Airspace Resilience Modeling Library
The Airspace Resilience Modeling Library (airspacelib) is a library that can be used to simulate drones and other aircraft interacting with their environment at a high level. The goal of the airspacelib package is to enable the rapid simulation of drones in the airspace. It also provides a demonstration of how one can develop a domain-specific library using fmdtools constructs, such as aircraft in a shared airspace.
The airspacelib package extends the fmdtools modeling and simulation library with drone-specific classes to represent drone behaviors (e.g., 3D trajectory, navigation, etc).
It also provides a number of worked examples of drone modelling in a range of use-cases, including drone in-flight contingency management and wildfire response.
You can view a short overview of each in the Wildfire Response Demo Presentation and Contingency Management Demo Presentation
Further description and use of the model is given in the provided notebooks:
References:
Hulse, D. E., Mbaye, S., & Davies, M. D. (2025). Determining Optimal Asset Location for Rapid and Efficient Wildfire Suppression: A Simulation-Based Approach. In AIAA SCITECH 2025 Forum (p. 0451).
Package Structure
The airspacelib package has the following structure:
airspacelib.base: base classes that can be adapted to new case studies
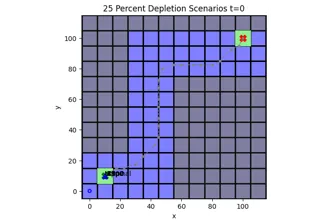
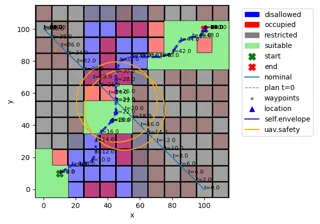
airspacelib.contingency_management: case study modelling a drone that must perform in-flight contingency management to respond to battery depletion and airspace intrusion scenarios, including:
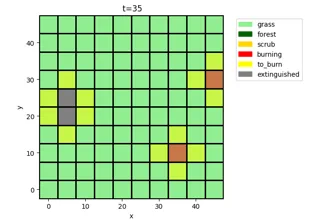
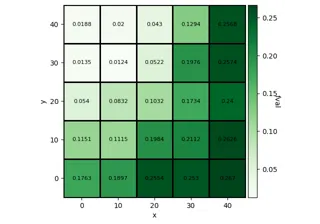
airspacelib.wildfire_response: case study modelling a set of drones in a wildfire response situation. The documentation for this module includes: