Overview: Navigating Rover Model
Why: Understanding (More) Autonomous Systems Resilience {.smaller}
:::: {.columns}
::: {.column width=”35%”}
 :::
::: {.column width=”65%”}
:::
::: {.column width=”65%”}
Autonomy presents major challenges to existing hazard simulation methodologies
Need to better account for interactions between human/autonomous operators, engineered system(s) and the environment
Rover acts as testbed for new methods for modeling human/system/environment interactions ::: ::::
Rover Model Structure {.smaller}
:::: {.columns} ::: {.column width=”40%”}
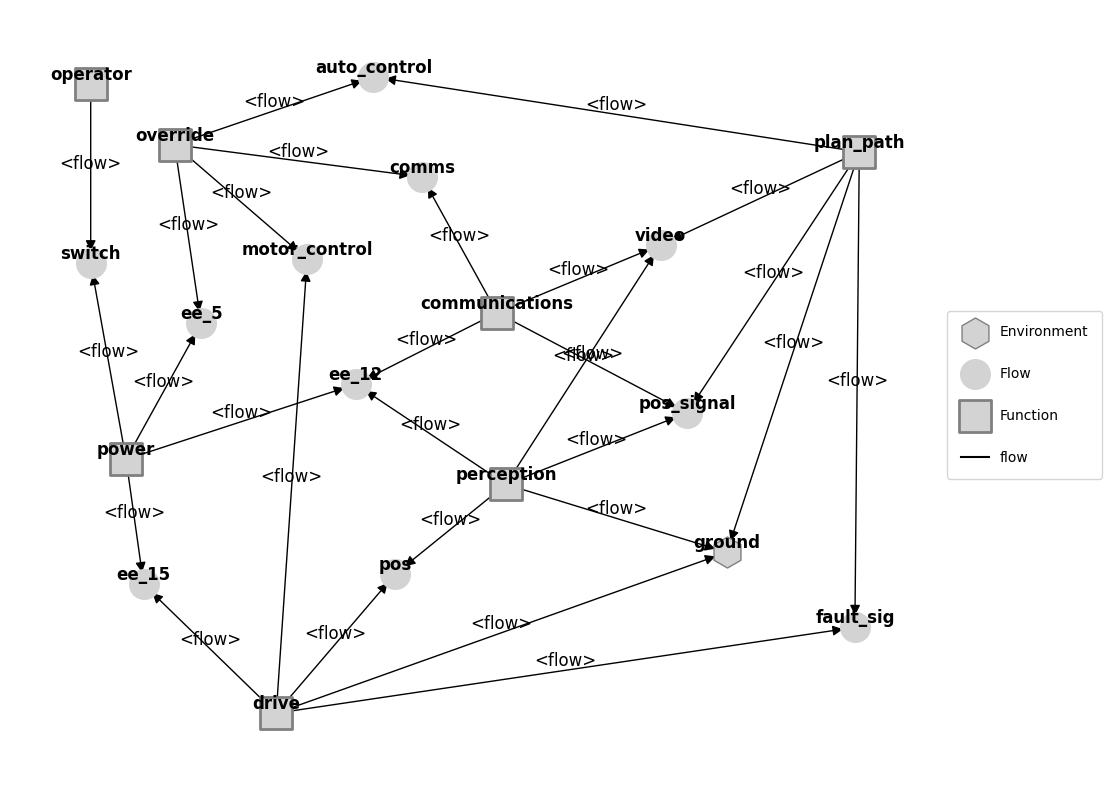
The main functions are:
power, the power supplycommunications, the radio that relays position to operatorsplan_path, the planner that determines where to go given its current positionoverride, the system that enables the operator to control the roverperception, the camera/AI system that perceives the groundenvironment, which defines the line the rover must follow
::: ::: {.column width=”60%”}
#| echo: true
from model_main import Rover, pos, plot_map
mg = Rover().as_modelgraph()
mg.set_pos(**pos)
fig, ax = mg.draw()
::: ::::
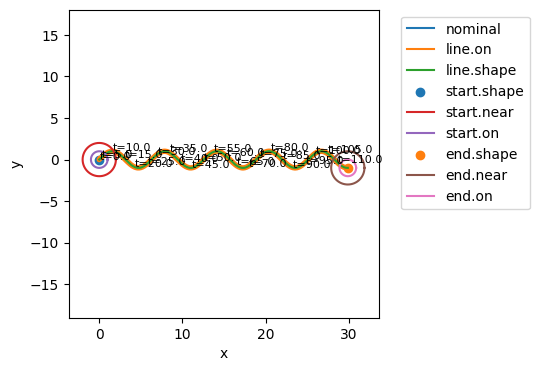
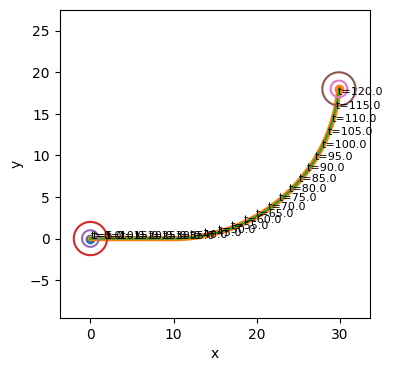
Rover Environment
The rover is designed to follow a line from its start to its destination. The rover has two environments that it can navigate through: a sine wave and an L-shaped curve
:::: {.columns} ::: {.column width=”60%”}
from fmdtools.sim import propagate
mdl = Rover()
res, hist = propagate.nominal(mdl)
fig, ax = plot_map(mdl, hist)
::: ::: {.column width=”40%”}
mdl = Rover(p={'ground': {'linetype': 'turn'}})
res, hist = propagate.nominal(mdl)
fig, ax = plot_map(mdl, hist, coord_kwargs=dict(legend=False), legend=False)
::: ::::
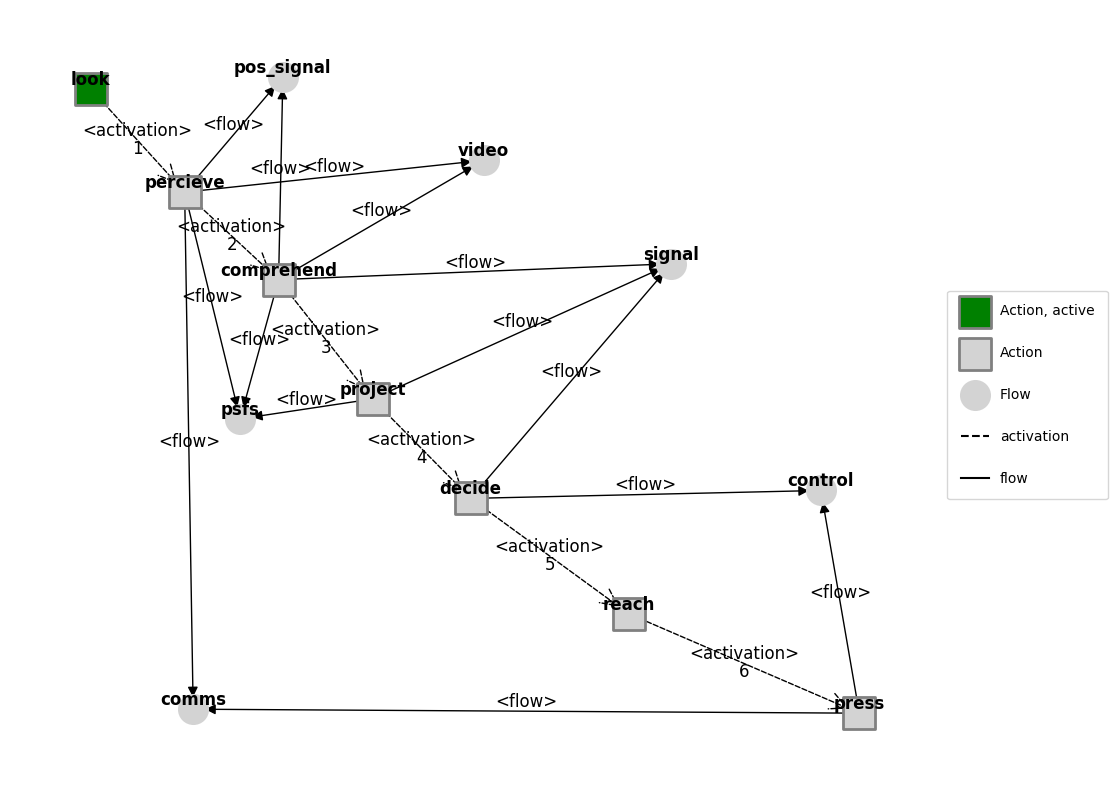
Human Modeling
To better represent human actions and behaviors, the human rover model represents the operator as an ActionArchitecture of actions that the human operator is expected to perform in sequence.
from model_human import RoverHuman, asg_pos
mdl = RoverHuman()
mg = mdl.fxns['operator'].aa.as_modelgraph()
mg.set_pos(**asg_pos)
fig, ax = mg.draw()
Human Modeling
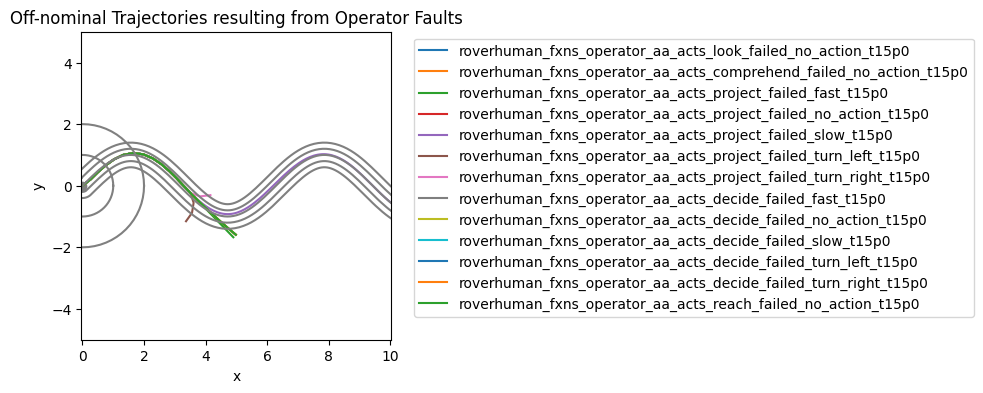
Given this representation, we can evaluate operator fault modes:
from fmdtools.sim.sample import FaultDomain, FaultSample
fd_hum = FaultDomain(mdl)
fd_hum.add_all_fxn_modes('operator')
fs_hum = FaultSample(fd_hum)
fs_hum.add_fault_phases("start")
ecs, hists = propagate.fault_sample(mdl, fs_hum)
SCENARIOS COMPLETE: 100%|██████████| 19/19 [00:05<00:00, 3.61it/s]
nomx, nomy = hists.nominal.flows.pos.s.x[-1], hists.nominal.flows.pos.s.y[-1]
comp_groups = {h: h for h, k in hists.nest(1).items() if not (k.flows.pos.s.x[-1]==nomx and k.flows.pos.s.y[-1]==nomy)}
gcs = {'shapes': {k: {'color': 'gray'} for k in ['on', 'near', 'shape']}}
geoms = {k: gcs for k in ['start', 'line', 'end']}
fig, ax = plot_map(mdl, hists, geoms=geoms, time_groups=[], comp_groups=comp_groups, coord_kwargs={'legend': False})
ax.set_xlim(0, 10)
ax.set_ylim(-5, 5)
a = ax.set_title("Off-nominal Trajectories resulting from Operator Faults")
Ignoring fixed x limits to fulfill fixed data aspect with adjustable data limits.
Degradation Modeling {.smaller}
The degradation modeling component of the rover model enables the representation of degraded human and component parameters, such as part wear and stress.
The figures below (generated in demo_degradation.ipynb) show the degradation of parameters over time as well as their ability to cause failures.
:::: {.columns}
::: {.column width=”50%”}
 :::
::: {.column width=”50%”}
:::
::: {.column width=”50%”}
 :::
::::
:::
::::
Failure Mode Exploration {.smaller}
The rover has also been used to develop approaches to synthetically generate failure modes.
In this methodology, failure modes are sampled from sets of failure-effecting parameters, as shown below (along with resulting trajectories):
:::: {.columns}
::: {.column width=”50%”}
 :::
::: {.column width=”50%”}
:::
::: {.column width=”50%”}
 :::
::::
:::
::::
Conclusions {.smaller}
The rover model is used as a testbed to develop a number of hazard analysis methodologies for autonomy, including:
human/autonomous systems modeling, which can be used to represent the high-level actions a human or autonomous systems perform as well as hand-off between human and autonomous systems control,
human/component degradation modeling, which can be used to represent human performance degradation in autonomous systems control modes, and
synthetic failure mode exploration, which can be used to explore the space of potential modes in autonomy-related components (e.g., machine learning component input-output combinations)