|
NASA Astrobee Robot Software
0.19.1
Flight software for the Astrobee robots operating inside the International Space Station.
|
|
NASA Astrobee Robot Software
0.19.1
Flight software for the Astrobee robots operating inside the International Space Station.
|
#include <graph_localizer.h>
Public Member Functions | |
| GraphLocalizer (const GraphLocalizerParams ¶ms) | |
| GraphLocalizer () | |
| void | AddPoseMeasurement (const localization_measurements::PoseWithCovarianceMeasurement &pose_measurement) |
| void | AddSparseMapMatchedProjectionsMeasurement (const localization_measurements::MatchedProjectionsMeasurement &matched_projections_measurement) |
| void | AddArTagMatchedProjectionsMeasurement (const localization_measurements::MatchedProjectionsMeasurement &matched_projections_measurement) |
| const nodes::TimestampedNodes< gtsam::Pose3 > & | pose_nodes () const |
| void | SetPoseCovarianceInterpolater (const std::shared_ptr< localization_common::MarginalsPoseCovarianceInterpolater< nodes::CombinedNavStateNodes >> &pose_covariance_interpolater) |
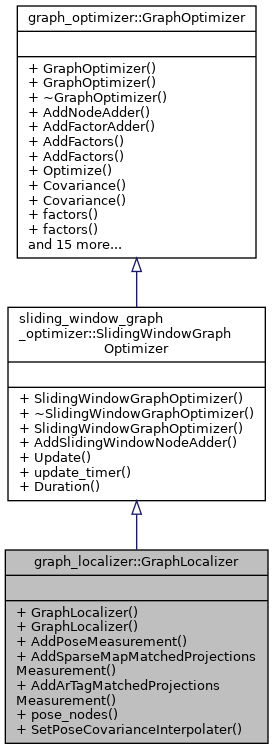
 Public Member Functions inherited from sliding_window_graph_optimizer::SlidingWindowGraphOptimizer Public Member Functions inherited from sliding_window_graph_optimizer::SlidingWindowGraphOptimizer | |
| SlidingWindowGraphOptimizer (const SlidingWindowGraphOptimizerParams ¶ms, std::unique_ptr< optimizers::Optimizer > optimizer) | |
| virtual | ~SlidingWindowGraphOptimizer ()=default |
| SlidingWindowGraphOptimizer () | |
| void | AddSlidingWindowNodeAdder (std::shared_ptr< node_adders::SlidingWindowNodeAdder > sliding_window_node_adder) |
| bool | Update () |
| const localization_common::Timer & | update_timer () const |
| double | Duration () const |
| Public Member Functions inherited from graph_optimizer::GraphOptimizer | |
| GraphOptimizer (const GraphOptimizerParams ¶ms, std::unique_ptr< optimizers::Optimizer > optimizer) | |
| GraphOptimizer () | |
| virtual | ~GraphOptimizer ()=default |
| void | AddNodeAdder (std::shared_ptr< node_adders::NodeAdder > node_adder) |
| void | AddFactorAdder (std::shared_ptr< factor_adders::FactorAdder > factor_adder) |
| int | AddFactors (const localization_common::Time start_time, const localization_common::Time end_time) |
| int | AddFactors (const std::pair< localization_common::Time, localization_common::Time > &start_and_end_time) |
| bool | Optimize () |
| boost::optional< gtsam::Matrix > | Covariance (const gtsam::Key &key) const |
| boost::optional< gtsam::Matrix > | Covariance (const gtsam::Key &key_a, const gtsam::Key &key_b) const |
| const gtsam::NonlinearFactorGraph & | factors () const |
| gtsam::NonlinearFactorGraph & | factors () |
| template<typename FactorType > | |
| std::vector< boost::shared_ptr< const FactorType > > | Factors () const |
| int | num_factors () const |
| template<typename FactorType > | |
| int | NumFactors () const |
| int | num_values () const |
| const GraphOptimizerParams & | params () const |
| std::shared_ptr< nodes::Values > | values () |
| const gtsam::Values & | gtsam_values () const |
| localization_common::StatsLogger & | stats_logger () |
| const localization_common::Timer & | optimization_timer () const |
| const localization_common::Averager & | optimization_iterations_averager () const |
| double | TotalGraphError () const |
| virtual bool | ValidGraph () const |
| virtual void | Print () const |
| void | SaveGraphDotFile (const std::string &output_path="graph.dot") const |
| boost::optional< const gtsam::Marginals & > | marginals () const |
Friends | |
| class | boost::serialization::access |
|
explicit |
|
inline |
| void graph_localizer::GraphLocalizer::AddArTagMatchedProjectionsMeasurement | ( | const localization_measurements::MatchedProjectionsMeasurement & | matched_projections_measurement | ) |
| void graph_localizer::GraphLocalizer::AddPoseMeasurement | ( | const localization_measurements::PoseWithCovarianceMeasurement & | pose_measurement | ) |
| void graph_localizer::GraphLocalizer::AddSparseMapMatchedProjectionsMeasurement | ( | const localization_measurements::MatchedProjectionsMeasurement & | matched_projections_measurement | ) |
| const no::TimestampedNodes< gtsam::Pose3 > & graph_localizer::GraphLocalizer::pose_nodes | ( | ) | const |
| void graph_localizer::GraphLocalizer::SetPoseCovarianceInterpolater | ( | const std::shared_ptr< localization_common::MarginalsPoseCovarianceInterpolater< nodes::CombinedNavStateNodes >> & | pose_covariance_interpolater | ) |
|
friend |