Note
Go to the end to download the full example code.
Optimal Transfer With Time Trigger¶
from time import perf_counter
import matplotlib.pyplot as plt
import numpy as np
from _sgm_test_util import LTI_plot
import condor as co
# either include time as state or increase tolerances to ensure sufficient ODE solver
# accuracy
with_time_state = False
Define the double integrator system
class DblInt(co.ODESystem):
A = np.array([[0, 1], [0, 0]])
B = np.array([[0], [1]])
x = state(shape=A.shape[0])
mode = state()
u = modal()
dot[x] = A @ x + B * u
if with_time_state:
tt = state()
dot[tt] = 1.0
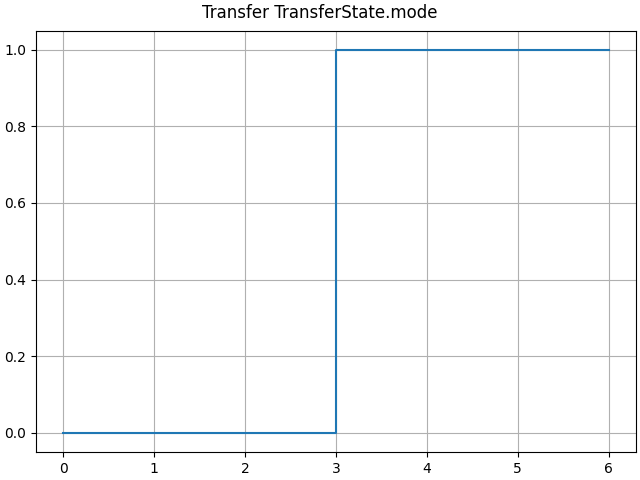
Now a mode to accelerate
class Accel(DblInt.Mode):
condition = mode == 0.0
action[u] = 1.0
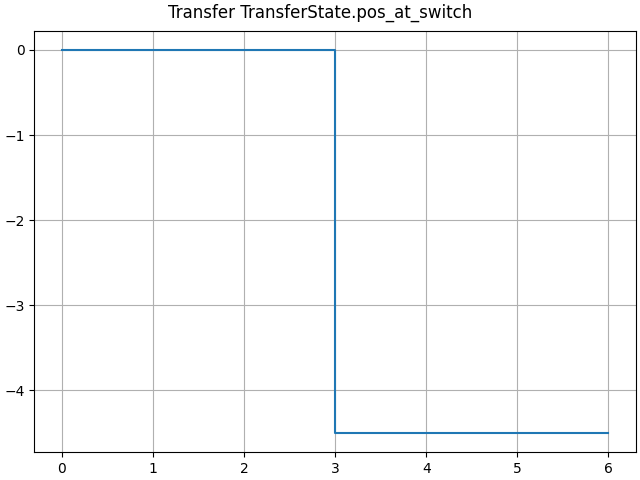
An event to switch to deceleration, specified by a parameter \(t_1\). We’ll also create a state to capture the position at the switch event.
class Switch1(DblInt.Event):
t1 = parameter()
pos_at_switch = state()
at_time = t1
update[mode] = 1.0
update[pos_at_switch] = x[0]
Now the mode to switch to deceleration, triggered by Switch1 updating the
mode.
class Decel(DblInt.Mode):
condition = mode == 1.0
action[u] = -1.0
Finally a terminating event specified by a new parameter \(t_2\).
class Switch2(DblInt.Event):
t2 = parameter()
at_time = Switch1.t1 + t2
terminate = True
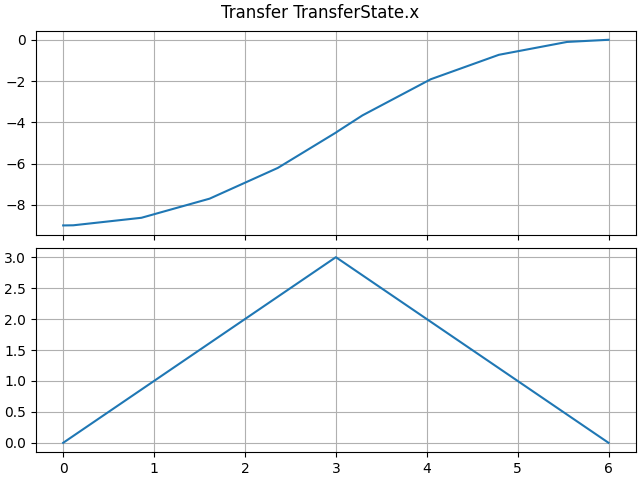
The trajectory analysis adds a terminal quadratic cost for error with respect to the desired final position \((0, 0)\).
class Transfer(DblInt.TrajectoryAnalysis):
initial[x] = [-9.0, 0.0]
Q = np.eye(2)
cost = trajectory_output((x.T @ Q @ x) / 2)
if not with_time_state:
class Options:
state_adaptive_min_steps = 4
sim = Transfer(t1=1.0, t2=4.0)
print(sim.pos_at_switch)
# jac = sim.implementation.callback.jac_callback(sim.implementation.callback.p, [])
[ 0. 0. 0. 0. 0. 0. 0. 0. 0. -8.5 -8.5 -8.5 -8.5 -8.5
-8.5]
Now embed the trajectory analysis in an optimization to minimize the final position error over transfer and final times.
class MinimumTime(co.OptimizationProblem):
t1 = variable(lower_bound=0)
t2 = variable(lower_bound=0)
transfer = Transfer(t1, t2)
objective = transfer.cost
class Options:
# exact_hessian = False
__implementation__ = co.implementations.ScipyCG
"""
old:
eval jacobian for jac_Transfer
args [DM([1, 4]), DM(00)]
p=[1, 4]
[[-56.9839, 0]]
"""
'\nold:\neval jacobian for jac_Transfer\nargs [DM([1, 4]), DM(00)]\np=[1, 4]\n[[-56.9839, 0]]\n\n\n\n'
MinimumTime.set_initial(t1=2.163165480675697, t2=4.361971866705403)
t_start = perf_counter()
opt = MinimumTime()
t_stop = perf_counter()
print("time to run:", t_stop - t_start)
print(opt.t1, opt.t2)
# print(jac)
print(opt._stats)
/opt/hostedtoolcache/Python/3.12.13/x64/lib/python3.12/site-packages/condor/implementations/iterative.py:484: RuntimeWarning: Method CG cannot handle bounds.
min_out = minimize(
time to run: 0.2954439749999551
[2.99999968] [2.99999216]
message: Optimization terminated successfully.
success: True
status: 0
fun: 3.008671643193588e-11
x: [ 3.000e+00 3.000e+00]
nit: 12
jac: [-4.048e-06 -7.514e-06]
nfev: 22
njev: 22
LTI_plot(opt.transfer)
Another version of the transfer analysis excluding the switch event.
class AccelerateTransfer(DblInt.TrajectoryAnalysis, exclude_events=[Switch1]):
initial[x] = [-9.0, 0.0]
Q = np.eye(2)
cost = trajectory_output((x.T @ Q @ x) / 2)
if not with_time_state:
class Options:
state_adaptive_min_steps = 4
# TODO?
# class AccelerateTransfer(Transfer, exclude_events=[Switch1]):
# pass
sim_accel = AccelerateTransfer(**opt.transfer.parameter.asdict())
assert sim_accel._res.e[0].rootsfound.size == opt.transfer._res.e[0].rootsfound.size - 1 # noqa
plt.show()
Total running time of the script: (0 minutes 0.663 seconds)