#include <sys_monitor.h>
|
| void | AddWatchDog (ros::Duration const &timeout, std::string const &node_name, uint const allowed_misses, uint const fault_id) |
| |
| void | SetFaultState (unsigned int fault_id, bool adding_fault) |
| |
| void | HeartbeatCallback (ff_msgs::HeartbeatConstPtr const &heartbeat) |
| |
| void | AssertFault (ff_util::FaultKeys enum_key, std::string const &message, ros::Time time_fault_occurred=ros::Time::now()) |
| |
| void | ClearFault (ff_util::FaultKeys enum_key) |
| |
| virtual void | Initialize (ros::NodeHandle *nh) |
| |
| void | OutputFaultTables () |
| |
| void | PublishCmd (ff_msgs::CommandStampedPtr cmd) |
| |
| void | PublishFaultConfig () |
| |
| void | PublishFaultState () |
| |
| void | PublishFaultResponse (unsigned int fault_id) |
| |
| void | PublishHeartbeatCallback (ros::TimerEvent const &te) |
| |
| void | PublishHeartbeat (bool initialization_fault=false) |
| |
| void | PublishTimeDiff (float time_diff_sec) |
| |
| void | StartupTimerCallback (ros::TimerEvent const &te) |
| |
| void | ReloadNodeletTimerCallback (ros::TimerEvent const &te) |
| |
| bool | ReadParams () |
| |
| bool | ReadCommand (config_reader::ConfigReader::Table *entry, ff_msgs::CommandStampedPtr cmd) |
| |
| bool | NodeletService (ff_msgs::UnloadLoadNodelet::Request &req, ff_msgs::UnloadLoadNodelet::Response &res) |
| |
| int | LoadNodelet (ff_msgs::UnloadLoadNodelet::Request &req) |
| |
| int | UnloadNodelet (std::string const &nodelet, std::string const &manager) |
| |
| virtual void | Reset () |
| |
| virtual void | Sleep () |
| |
| virtual void | Wakeup () |
| |
| void | StopHeartbeat () |
| |
| void | SendDiagnostics (const std::vector< diagnostic_msgs::KeyValue > &keyval) |
| |
| void | Setup (ros::NodeHandle &nh, ros::NodeHandle &nh_mt, std::string plugin_name) |
| |
◆ WatchdogPtr
◆ SysMonitor()
| sys_monitor::SysMonitor::SysMonitor |
( |
| ) |
|
◆ ~SysMonitor()
| sys_monitor::SysMonitor::~SysMonitor |
( |
| ) |
|
◆ AddFault() [1/2]
| void sys_monitor::SysMonitor::AddFault |
( |
ff_msgs::Fault const & |
fault, |
|
|
bool |
check_added = false |
|
) |
| |
◆ AddFault() [2/2]
| void sys_monitor::SysMonitor::AddFault |
( |
unsigned int |
fault_id, |
|
|
std::string const & |
fault_msg = "", |
|
|
ros::Time |
time_occurred = ros::Time::now() |
|
) |
| |
Add fault to fault state and publish fault state.
- Parameters
-
| fault_id | unique fault id |
| fault_msg | message containing fault information
|
| time_occurred | time fault occurred |
◆ AddWatchDog()
| void sys_monitor::SysMonitor::AddWatchDog |
( |
ros::Duration const & |
timeout, |
|
|
std::string const & |
node_name, |
|
|
uint const |
allowed_misses, |
|
|
uint const |
fault_id |
|
) |
| |
|
protected |
Add a watchdog for node_name if one does not exist
- Parameters
-
| node_name | unique node name, use ros::this_node::getName() |
| timeout | watchdog timer timeout |
| allowed_misses | allowable missed watchdog timeouts |
| fault_id | unique fault id |
◆ AssertFault()
| void sys_monitor::SysMonitor::AssertFault |
( |
ff_util::FaultKeys |
enum_key, |
|
|
std::string const & |
message, |
|
|
ros::Time |
time_fault_occurred = ros::Time::now() |
|
) |
| |
|
protected |
◆ ChangeFaultErrMsg()
| void sys_monitor::SysMonitor::ChangeFaultErrMsg |
( |
unsigned int |
fault_id, |
|
|
std::string |
err_msg |
|
) |
| |
◆ ClearFault()
◆ HeartbeatCallback()
| void sys_monitor::SysMonitor::HeartbeatCallback |
( |
ff_msgs::HeartbeatConstPtr const & |
heartbeat | ) |
|
|
protected |
Heartbeat callback will reset watchdog for the sender's node
- Parameters
-
| heartbeat | received message |
◆ Initialize()
| void sys_monitor::SysMonitor::Initialize |
( |
ros::NodeHandle * |
nh | ) |
|
|
protectedvirtual |
◆ LoadNodelet()
| int sys_monitor::SysMonitor::LoadNodelet |
( |
ff_msgs::UnloadLoadNodelet::Request & |
req | ) |
|
|
protected |
◆ NodeletService()
| bool sys_monitor::SysMonitor::NodeletService |
( |
ff_msgs::UnloadLoadNodelet::Request & |
req, |
|
|
ff_msgs::UnloadLoadNodelet::Response & |
res |
|
) |
| |
|
protected |
◆ OutputFaultTables()
| void sys_monitor::SysMonitor::OutputFaultTables |
( |
| ) |
|
|
protected |
◆ PublishCmd()
| void sys_monitor::SysMonitor::PublishCmd |
( |
ff_msgs::CommandStampedPtr |
cmd | ) |
|
|
protected |
◆ PublishFaultConfig()
| void sys_monitor::SysMonitor::PublishFaultConfig |
( |
| ) |
|
|
protected |
◆ PublishFaultResponse()
| void sys_monitor::SysMonitor::PublishFaultResponse |
( |
unsigned int |
fault_id | ) |
|
|
protected |
◆ PublishFaultState()
| void sys_monitor::SysMonitor::PublishFaultState |
( |
| ) |
|
|
protected |
◆ PublishHeartbeat()
| void sys_monitor::SysMonitor::PublishHeartbeat |
( |
bool |
initialization_fault = false | ) |
|
|
protected |
◆ PublishHeartbeatCallback()
| void sys_monitor::SysMonitor::PublishHeartbeatCallback |
( |
ros::TimerEvent const & |
te | ) |
|
|
protected |
◆ PublishTimeDiff()
| void sys_monitor::SysMonitor::PublishTimeDiff |
( |
float |
time_diff_sec | ) |
|
|
protected |
◆ ReadCommand()
Read command will read in the command name and arguments to a command. If no command is specified, false is returned.
◆ ReadParams()
| bool sys_monitor::SysMonitor::ReadParams |
( |
| ) |
|
|
protected |
Read params will read in all the parameters from the lua config files. When reloading parameters with this function, the watch dog will be cleared and restarted. False is returned if unable to read in config files.
◆ ReloadNodeletTimerCallback()
| void sys_monitor::SysMonitor::ReloadNodeletTimerCallback |
( |
ros::TimerEvent const & |
te | ) |
|
|
protected |
◆ RemoveFault()
| void sys_monitor::SysMonitor::RemoveFault |
( |
unsigned int |
fault_id | ) |
|
◆ SetFaultState()
| void sys_monitor::SysMonitor::SetFaultState |
( |
unsigned int |
fault_id, |
|
|
bool |
adding_fault |
|
) |
| |
|
protected |
◆ StartupTimerCallback()
| void sys_monitor::SysMonitor::StartupTimerCallback |
( |
ros::TimerEvent const & |
te | ) |
|
|
protected |
◆ UnloadNodelet()
| int sys_monitor::SysMonitor::UnloadNodelet |
( |
std::string const & |
nodelet, |
|
|
std::string const & |
manager |
|
) |
| |
|
protected |
◆ all_faults_
| std::map<unsigned int, std::shared_ptr<Fault> > sys_monitor::SysMonitor::all_faults_ |
|
protected |
◆ config_params_
◆ fault_config_
| ff_msgs::FaultConfig sys_monitor::SysMonitor::fault_config_ |
|
protected |
◆ fault_state_
| ff_msgs::FaultState sys_monitor::SysMonitor::fault_state_ |
|
protected |
◆ heartbeat_
| ff_msgs::Heartbeat sys_monitor::SysMonitor::heartbeat_ |
|
protected |
◆ heartbeat_pub_rate_
| unsigned int sys_monitor::SysMonitor::heartbeat_pub_rate_ |
|
protected |
◆ heartbeat_timer_
| ros::Timer sys_monitor::SysMonitor::heartbeat_timer_ |
|
protected |
◆ load_service_
| nodelet::NodeletLoad sys_monitor::SysMonitor::load_service_ |
|
protected |
◆ log_time_hlp_
| bool sys_monitor::SysMonitor::log_time_hlp_ |
|
protected |
◆ log_time_llp_
| bool sys_monitor::SysMonitor::log_time_llp_ |
|
protected |
◆ nh_
| ros::NodeHandle sys_monitor::SysMonitor::nh_ |
|
protected |
◆ num_current_blocking_fault_
| int sys_monitor::SysMonitor::num_current_blocking_fault_ |
|
protected |
◆ pub_cmd_
| ros::Publisher sys_monitor::SysMonitor::pub_cmd_ |
|
protected |
◆ pub_fault_config_
| ros::Publisher sys_monitor::SysMonitor::pub_fault_config_ |
|
protected |
◆ pub_fault_state_
| ros::Publisher sys_monitor::SysMonitor::pub_fault_state_ |
|
protected |
◆ pub_heartbeat_
| ros::Publisher sys_monitor::SysMonitor::pub_heartbeat_ |
|
protected |
◆ pub_queue_size_
| int sys_monitor::SysMonitor::pub_queue_size_ |
|
protected |
◆ pub_time_sync_
| ros::Publisher sys_monitor::SysMonitor::pub_time_sync_ |
|
protected |
◆ reload_nodelet_timeout_
| unsigned int sys_monitor::SysMonitor::reload_nodelet_timeout_ |
|
protected |
◆ reload_nodelet_timer_
| ros::Timer sys_monitor::SysMonitor::reload_nodelet_timer_ |
|
protected |
◆ reload_params_timer_
| ros::Timer sys_monitor::SysMonitor::reload_params_timer_ |
|
protected |
◆ reloaded_nodelets_
| std::vector<std::string> sys_monitor::SysMonitor::reloaded_nodelets_ |
|
protected |
◆ startup_time_
| unsigned int sys_monitor::SysMonitor::startup_time_ |
|
protected |
◆ startup_timer_
| ros::Timer sys_monitor::SysMonitor::startup_timer_ |
|
protected |
◆ sub_hb_
| ros::Subscriber sys_monitor::SysMonitor::sub_hb_ |
|
protected |
◆ sub_queue_size_
| int sys_monitor::SysMonitor::sub_queue_size_ |
|
protected |
◆ time_diff_fault_triggered_
| bool sys_monitor::SysMonitor::time_diff_fault_triggered_ |
|
protected |
◆ time_diff_node_
| std::string sys_monitor::SysMonitor::time_diff_node_ |
|
protected |
◆ time_drift_thres_sec_
| float sys_monitor::SysMonitor::time_drift_thres_sec_ |
|
protected |
◆ unload_load_nodelet_service_
| ros::ServiceServer sys_monitor::SysMonitor::unload_load_nodelet_service_ |
|
protected |
◆ unload_service_
| nodelet::NodeletUnload sys_monitor::SysMonitor::unload_service_ |
|
protected |
◆ unwatched_heartbeats_
| std::vector<std::string> sys_monitor::SysMonitor::unwatched_heartbeats_ |
|
protected |
◆ watch_dogs_
| std::map<std::string, WatchdogPtr> sys_monitor::SysMonitor::watch_dogs_ |
|
protected |
The documentation for this class was generated from the following files:
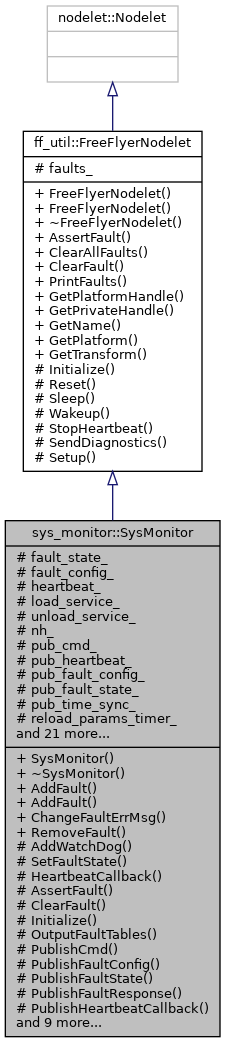
 Public Member Functions inherited from ff_util::FreeFlyerNodelet
Public Member Functions inherited from ff_util::FreeFlyerNodelet