|
NASA Astrobee Robot Software
0.19.1
Flight software for the Astrobee robots operating inside the International Space Station.
|
|
NASA Astrobee Robot Software
0.19.1
Flight software for the Astrobee robots operating inside the International Space Station.
|
#include <ros/ros.h>#include <ff_common/ff_names.h>#include <ff_hw_msgs/EpsBatteryLocation.h>#include <sensor_msgs/BatteryState.h>#include <sensor_msgs/Temperature.h>#include <eps_driver/eps_driver.h>#include <string>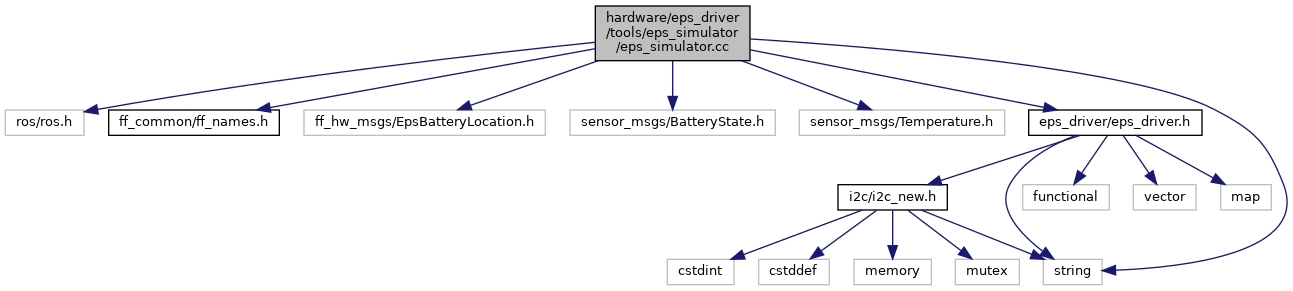
Macros | |
| #define | MESSAGE_QUEUE_SIZE 10 |
Functions | |
| sensor_msgs::BatteryState | RandomBatteryState (std::string const &location, std_msgs::Header const &header, bool present) |
| sensor_msgs::Temperature | RandomBatteryTemperature (std_msgs::Header const &header) |
| void | TelemetryCallback (const ros::TimerEvent &event) |
| int | main (int argc, char **argv) |
Variables | |
| ros::Publisher | pub_batt_tl_ |
| ros::Publisher | pub_batt_tr_ |
| ros::Publisher | pub_batt_bl_ |
| ros::Publisher | pub_batt_br_ |
| ros::Publisher | pub_temp_tl_ |
| ros::Publisher | pub_temp_tr_ |
| ros::Publisher | pub_temp_bl_ |
| ros::Publisher | pub_temp_br_ |
| bool | tl_ |
| bool | tr_ |
| bool | bl_ |
| bool | br_ |
| std::string | name = "/" |
| #define MESSAGE_QUEUE_SIZE 10 |
| int main | ( | int | argc, |
| char ** | argv | ||
| ) |
| sensor_msgs::BatteryState RandomBatteryState | ( | std::string const & | location, |
| std_msgs::Header const & | header, | ||
| bool | present | ||
| ) |
| sensor_msgs::Temperature RandomBatteryTemperature | ( | std_msgs::Header const & | header | ) |
| void TelemetryCallback | ( | const ros::TimerEvent & | event | ) |
| bool bl_ |
| bool br_ |
| std::string name = "/" |
| ros::Publisher pub_batt_bl_ |
| ros::Publisher pub_batt_br_ |
| ros::Publisher pub_batt_tl_ |
| ros::Publisher pub_batt_tr_ |
| ros::Publisher pub_temp_bl_ |
| ros::Publisher pub_temp_br_ |
| ros::Publisher pub_temp_tl_ |
| ros::Publisher pub_temp_tr_ |
| bool tl_ |
| bool tr_ |