#include <astrobee_gazebo.h>
◆ FreeFlyerPlugin()
| gazebo::FreeFlyerPlugin::FreeFlyerPlugin |
( |
std::string const & |
plugin_name, |
|
|
std::string const & |
plugin_frame, |
|
|
bool |
send_heartbeats = false |
|
) |
| |
|
explicit |
◆ ~FreeFlyerPlugin()
| gazebo::FreeFlyerPlugin::~FreeFlyerPlugin |
( |
| ) |
|
|
virtual |
◆ CallbackThread()
| void gazebo::FreeFlyerPlugin::CallbackThread |
( |
| ) |
|
|
protected |
◆ ExtrinsicsCallback()
| virtual bool gazebo::FreeFlyerPlugin::ExtrinsicsCallback |
( |
geometry_msgs::TransformStamped const * |
tf | ) |
|
|
protectedpure virtual |
◆ GetFrame()
| std::string gazebo::FreeFlyerPlugin::GetFrame |
( |
std::string |
target = "", |
|
|
std::string |
delim = "/" |
|
) |
| |
|
protected |
◆ InitializePlugin()
| void gazebo::FreeFlyerPlugin::InitializePlugin |
( |
std::string const & |
robot_name, |
|
|
std::string const & |
plugin_name |
|
) |
| |
|
protected |
◆ OnExtrinsicsReceived()
| virtual void gazebo::FreeFlyerPlugin::OnExtrinsicsReceived |
( |
ros::NodeHandle * |
nh | ) |
|
|
inlineprotectedvirtual |
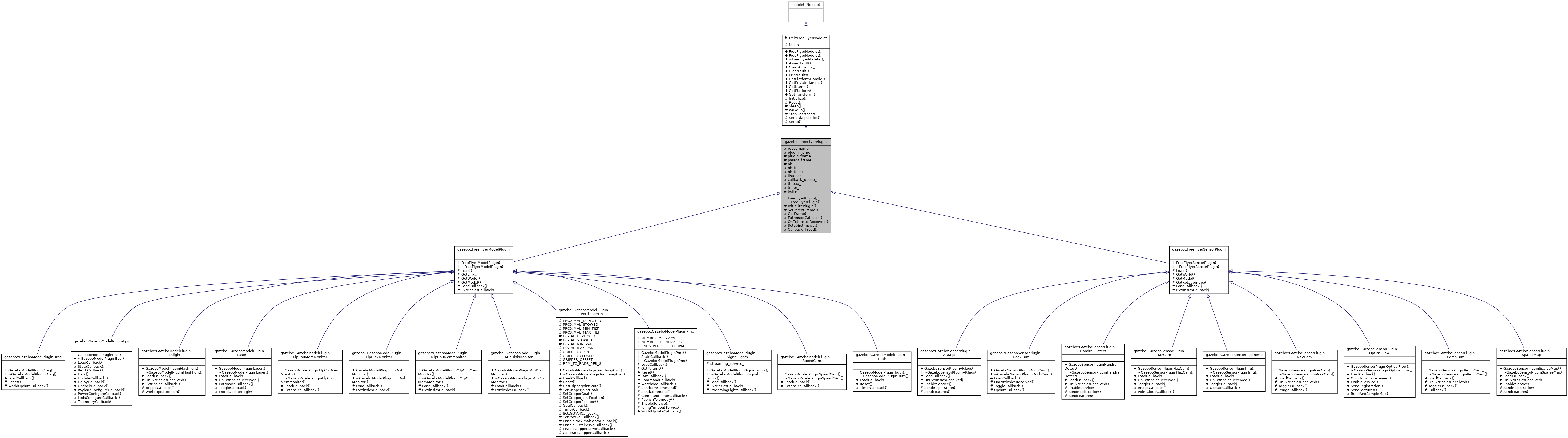
Reimplemented in gazebo::GazeboSensorPluginHazCam, gazebo::GazeboSensorPluginARTags, gazebo::GazeboSensorPluginPerchCam, gazebo::GazeboSensorPluginOpticalFlow, gazebo::GazeboSensorPluginSparseMap, gazebo::GazeboSensorPluginHandrailDetect, gazebo::GazeboSensorPluginNavCam, gazebo::GazeboSensorPluginDockCam, gazebo::GazeboModelPluginFlashlight, gazebo::GazeboSensorPluginImu, and gazebo::GazeboModelPluginLaser.
◆ SetParentFrame()
| void gazebo::FreeFlyerPlugin::SetParentFrame |
( |
std::string const & |
parent | ) |
|
|
protected |
◆ SetupExtrinsics()
| void gazebo::FreeFlyerPlugin::SetupExtrinsics |
( |
const ros::TimerEvent & |
event | ) |
|
|
protected |
◆ buffer_
| tf2_ros::Buffer gazebo::FreeFlyerPlugin::buffer_ |
|
protected |
◆ callback_queue_
| ros::CallbackQueue gazebo::FreeFlyerPlugin::callback_queue_ |
|
protected |
◆ listener_
| std::shared_ptr<tf2_ros::TransformListener> gazebo::FreeFlyerPlugin::listener_ |
|
protected |
◆ nh_
| ros::NodeHandle gazebo::FreeFlyerPlugin::nh_ |
|
protected |
◆ nh_ff_
| ros::NodeHandle gazebo::FreeFlyerPlugin::nh_ff_ |
|
protected |
◆ nh_ff_mt_
| ros::NodeHandle gazebo::FreeFlyerPlugin::nh_ff_mt_ |
|
protected |
◆ parent_frame_
| std::string gazebo::FreeFlyerPlugin::parent_frame_ |
|
protected |
◆ plugin_frame_
| std::string gazebo::FreeFlyerPlugin::plugin_frame_ |
|
protected |
◆ plugin_name_
| std::string gazebo::FreeFlyerPlugin::plugin_name_ |
|
protected |
◆ robot_name_
| std::string gazebo::FreeFlyerPlugin::robot_name_ |
|
protected |
◆ thread_
| std::thread gazebo::FreeFlyerPlugin::thread_ |
|
protected |
◆ timer_
| ros::Timer gazebo::FreeFlyerPlugin::timer_ |
|
protected |
The documentation for this class was generated from the following files:
 Public Member Functions inherited from ff_util::FreeFlyerNodelet
Public Member Functions inherited from ff_util::FreeFlyerNodelet