Note
Go to the end to download the full example code.
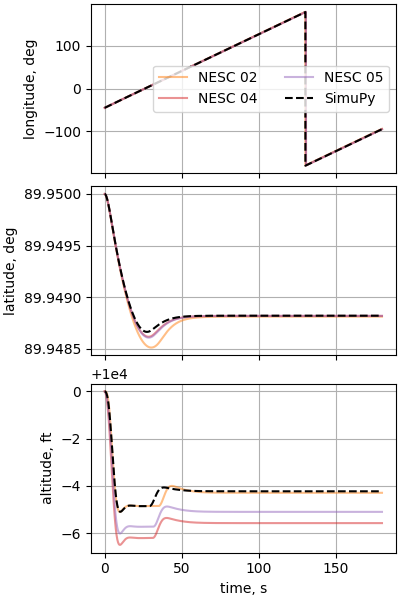
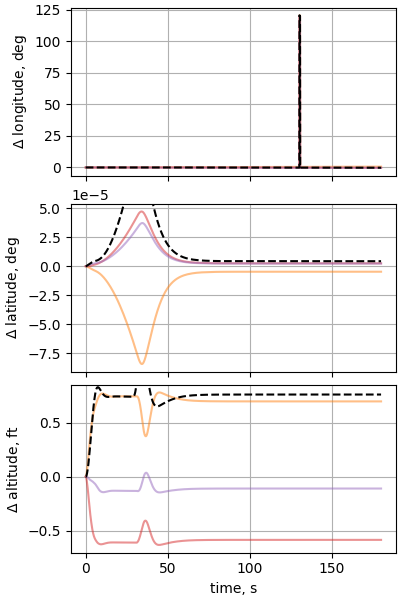
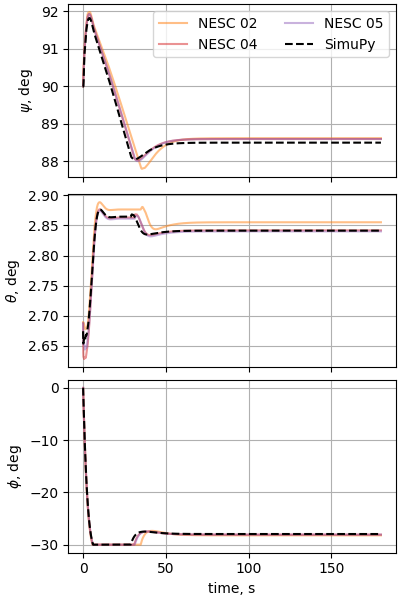
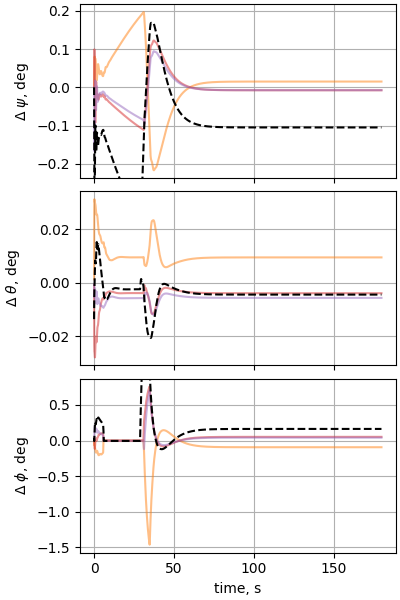
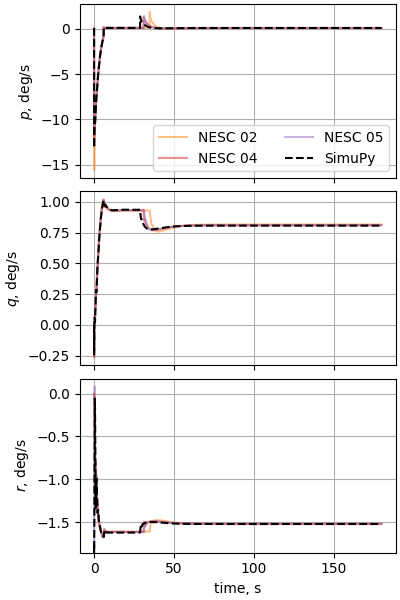
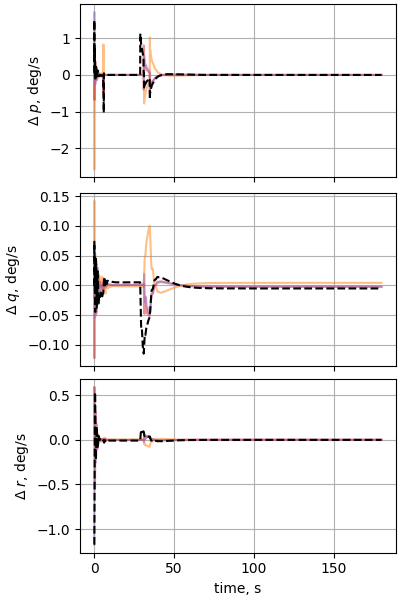
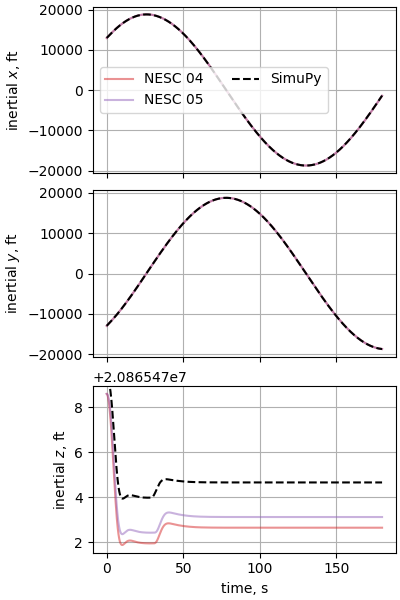
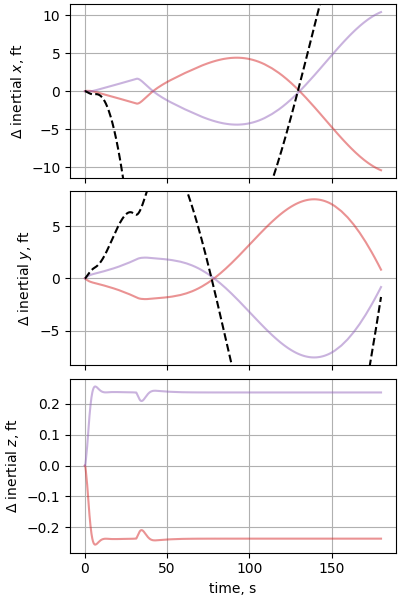
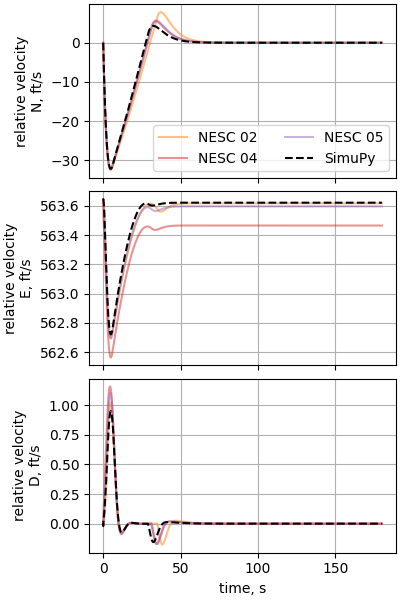
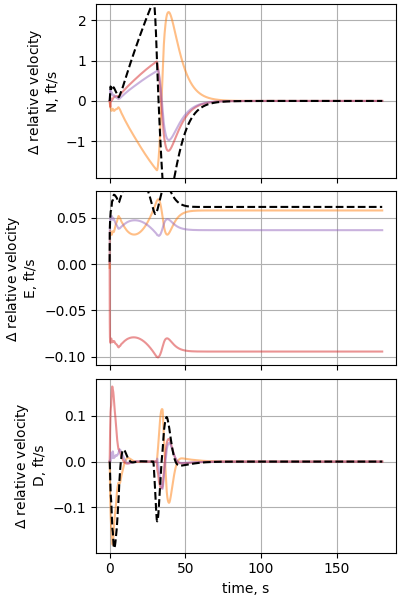
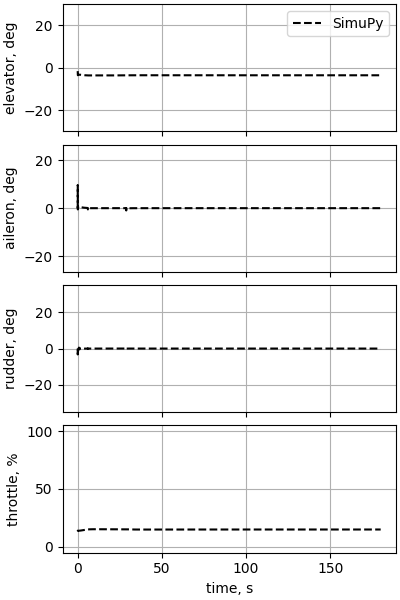
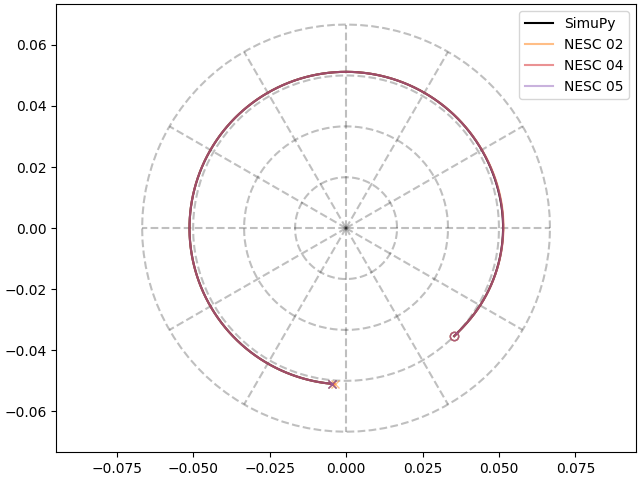
Case 15: Circular F-16 flight around North Pole
Verifies |
Propagation, geodetic transforms |
Gravitation |
J2 |
Geodesy |
WGS-84 rotating |
Atmosphere |
US 1976 STD |
Winds |
still air |
Vehicle |
F-16 with circumnavigating auto-pilot |
Notes |
Initially straight & level and engage auto-pilot |
from simupy import systems
from simupy.block_diagram import BlockDiagram
import os
import numpy as np
from scipy import interpolate
import matplotlib.pyplot as plt
from nesc_testcase_helper import (
get_baselines,
plot_nesc_comparisons,
plot_F16_controls,
nesc_options,
nesc_colors,
benchmark,
)
from nesc_testcase_helper import ft_per_m
from nesc_case11 import (
int_opts,
BD,
earth,
rho_0,
eval_trim,
run_trimmer,
knots_per_mps,
)
import F16_model
from F16_gnc import F16_gnc, trimmedKEAS
F16_vehicle = F16_model.F16()
spec_ic_args = dict(
phi_D=89.95 * np.pi / 180, # latitude
lamda_D=-45 * np.pi / 180, # longitude
h=10_000 / ft_per_m,
V_N=0.0 / ft_per_m,
V_E=563.643 / ft_per_m,
V_D=0.0 / ft_per_m,
psi=90.0 * np.pi / 180,
theta=0.0 * np.pi / 180,
phi=0.0 * np.pi / 180,
p_B=0.0 * np.pi / 180,
q_B=0.0 * np.pi / 180,
r_B=0.0 * np.pi / 180,
)
earth_output_for_gnc_select = np.array(
[
earth.phi_D_idx,
earth.lamda_D_idx,
earth.h_D_idx,
earth.V_T_idx,
earth.alpha_idx,
earth.beta_idx,
earth.psi_idx,
earth.theta_idx,
earth.phi_idx,
earth.p_B_idx,
earth.q_B_idx,
earth.r_B_idx,
earth.rho_idx,
]
)
dim_feedback = len(earth_output_for_gnc_select)
def get_gnc_function(
throttleTrim,
longStkTrim,
keasCmd=trimmedKEAS,
altCmd=spec_ic_args["h"] * ft_per_m,
sasOn=True,
apOn=True,
circlePoleSW=True,
):
def gnc_function(t, u):
throttle, longStk, latStk, pedal = 0.0, 0.0, 0.0, 0.0 # pilot command
(
latitude,
longitude,
alt,
V_T,
alpha,
beta,
psi,
theta,
phi,
pb,
qb,
rb, # feedback
rho,
) = u # rho to calculate equivalent airspeed
Vequiv = V_T * np.sqrt(rho / rho_0)
angles = np.array([latitude, longitude, alpha, beta, phi, theta, psi])
latitude, longitude, alpha, beta, phi, theta, psi = angles * 180 / np.pi
control_eart = F16_gnc(
throttle,
longStk,
latStk,
pedal,
sasOn,
apOn,
circlePoleSW,
latitude,
longitude,
keasCmd,
altCmd,
alt * ft_per_m,
Vequiv * knots_per_mps,
alpha,
beta,
phi,
theta,
psi,
pb,
qb,
rb,
throttleTrim,
longStkTrim,
)
return control_eart
return gnc_function
int_opts["nsteps"] = 100_000
if __name__ == "__main__":
opt_args, opt_ctrl = run_trimmer(
spec_ic_args, throttle_ic=0.0, longStk_ic=0.0, allow_roll=False
)
trimmed_flight_condition = earth.ic_from_planetodetic(**opt_args)
trimmed_KEAS = (
earth.output_equation_function(0, trimmed_flight_condition)[earth.V_T_idx]
* np.sqrt(
earth.output_equation_function(0, trimmed_flight_condition)[earth.rho_idx]
/ rho_0
)
* knots_per_mps
)
earth.initial_condition = trimmed_flight_condition
gnc_block = systems.SystemFromCallable(
get_gnc_function(
*opt_ctrl,
keasCmd=trimmed_KEAS,
),
dim_feedback,
4,
)
BD = BlockDiagram(earth, F16_vehicle, gnc_block)
BD.connect(earth, F16_vehicle, inputs=np.arange(earth.dim_output))
BD.connect(F16_vehicle, earth, inputs=np.arange(F16_vehicle.dim_output))
BD.connect(
gnc_block,
F16_vehicle,
inputs=np.arange(earth.dim_output, earth.dim_output + 4),
)
BD.connect(earth, gnc_block, outputs=earth_output_for_gnc_select)
with benchmark() as b:
res = BD.simulate(180, integrator_options=int_opts)
plot_nesc_comparisons(res, "15")
plot_F16_controls(res, "15", y_idx_offset=0)
def xy_for_north_pole_ground_track(lat, long):
xx = (90 - lat * 180 / np.pi) * np.cos(long)
yy = (90 - lat * 180 / np.pi) * np.sin(long)
return xx, yy
plt.subplots(constrained_layout=True)
plt.axis("equal")
sim_lat = res.y[:, earth.phi_D_idx]
sim_long = res.y[:, earth.lamda_D_idx]
# refence_lats = np.array([90.0, 90-0.02, 90-0.04, 90-0.06])*np.pi/180
refence_lats = (90 - np.arange(5) / 60) * np.pi / 180
reference_longs = np.arange(0, 360, 30) * np.pi / 180
ref_steps = 100
ref_lag_long_list = []
for i in range(len(refence_lats)):
ref_lag_long_list.append(
(refence_lats[i], np.arange(ref_steps + 1) * 2 * np.pi / ref_steps)
)
for j in range(len(reference_longs)):
ref_lag_long_list.append(
((90 - np.arange(5) / 60) * np.pi / 180, reference_longs[j])
)
for lat, long in ref_lag_long_list:
plt.plot(*xy_for_north_pole_ground_track(lat, long), "k--", alpha=0.25)
baseline_pds, baseline_pd_labels = get_baselines("15")
plt.plot(
*xy_for_north_pole_ground_track(sim_lat, sim_long),
"k-",
alpha=1.0,
label="SimuPy",
)
plt.plot(
*xy_for_north_pole_ground_track(sim_lat[0], sim_long[0]),
"o",
alpha=0.5,
markerfacecolor="None",
markeredgecolor="k",
)
plt.plot(
*xy_for_north_pole_ground_track(sim_lat[-1], sim_long[-1]),
"x",
alpha=0.5,
markerfacecolor="None",
markeredgecolor="k",
)
for baseline_idx, baseline_pd in enumerate(baseline_pds):
plt.plot(
*xy_for_north_pole_ground_track(
*(baseline_pd[["latitude_deg", "longitude_deg"]] * np.pi / 180).values.T
),
nesc_colors[baseline_pd_labels[baseline_idx]],
alpha=0.5,
label="NESC %s" % (baseline_pd_labels[baseline_idx]),
)
plt.plot(
*xy_for_north_pole_ground_track(
*(
baseline_pd[["latitude_deg", "longitude_deg"]].iloc[0] * np.pi / 180
).values.T
),
"o",
alpha=0.5,
markerfacecolor="None",
markeredgecolor=nesc_colors[baseline_pd_labels[baseline_idx]],
)
plt.plot(
*xy_for_north_pole_ground_track(
*(
baseline_pd[["latitude_deg", "longitude_deg"]].iloc[-1]
* np.pi
/ 180
).values.T
),
"x",
alpha=0.5,
markerfacecolor="None",
markeredgecolor=nesc_colors[baseline_pd_labels[baseline_idx]],
)
plt.legend()
if nesc_options["interactive_mode"]:
plt.show()
else:
plt.savefig(
os.path.join(nesc_options["save_relative_path"], "15_groundtrack.pdf")
)
Optimization terminated successfully.
Current function value: 5.307430
Iterations: 260
Function evaluations: 539
pitch: 2.6742e+00 roll: 0.0000e+00 longStk: 13.0082 throttle: 13.8357
accelerations:
[[-5.30742973e+00 -3.13605581e-08 -5.16943720e-08]
[-6.38762633e-07 8.60861093e-08 5.56269331e-09]]
time to simulate: 499.532 s
Total running time of the script: (8 minutes 26.644 seconds)