Note
Go to the end to download the full example code.
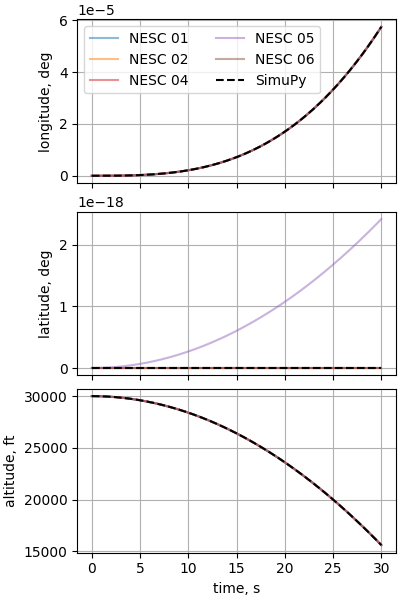
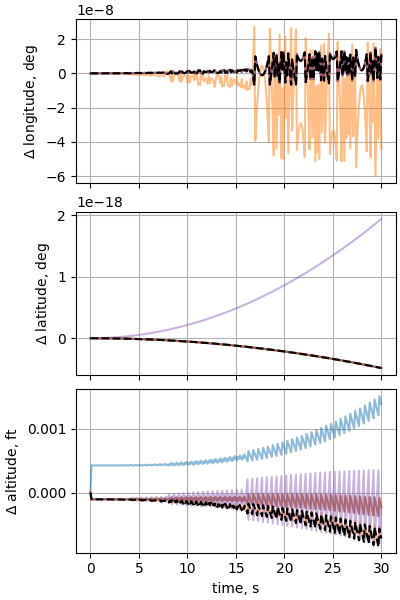
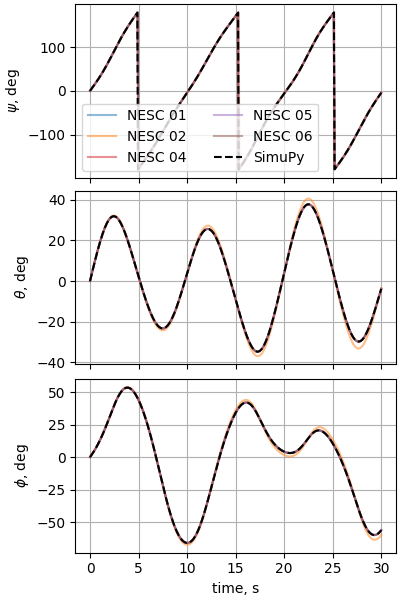
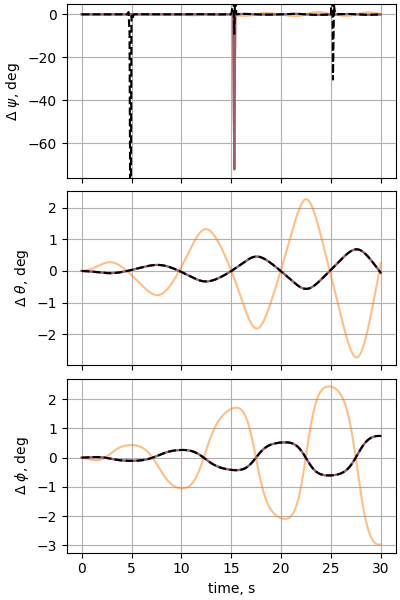
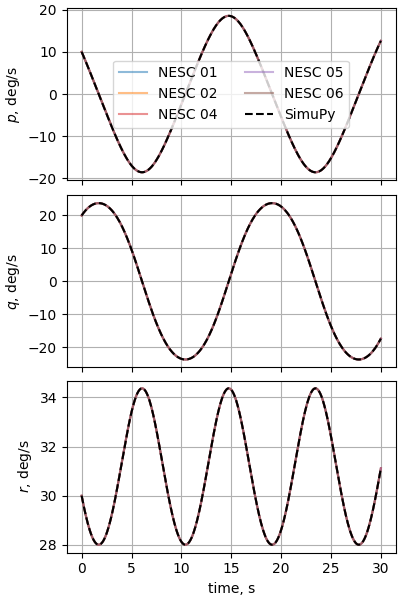
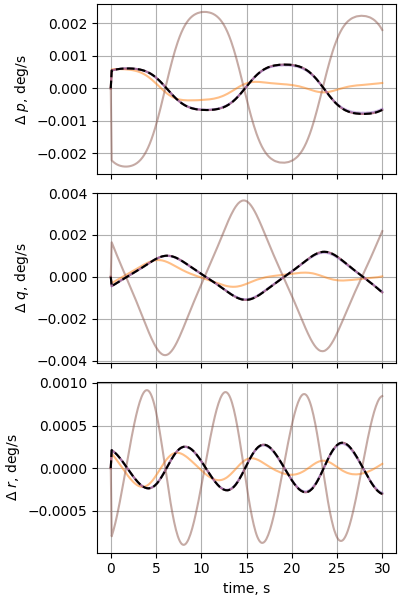
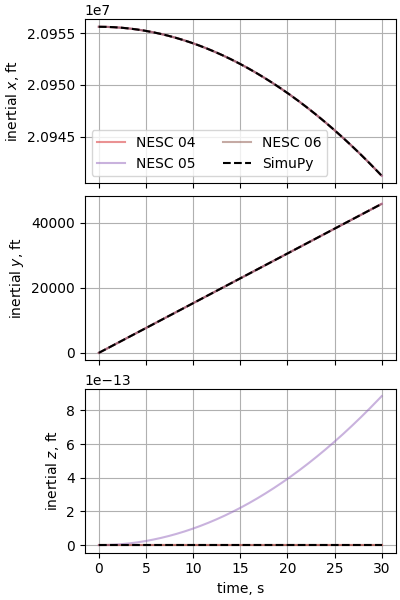
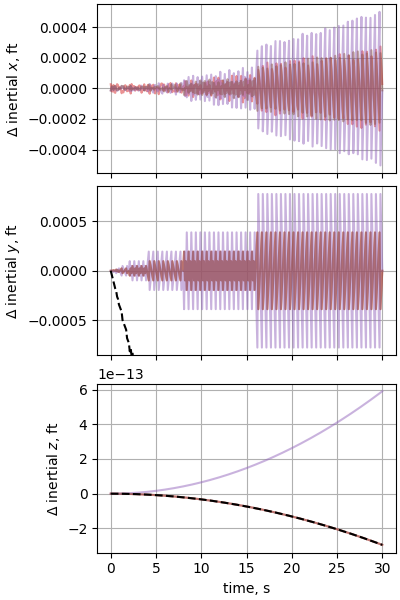
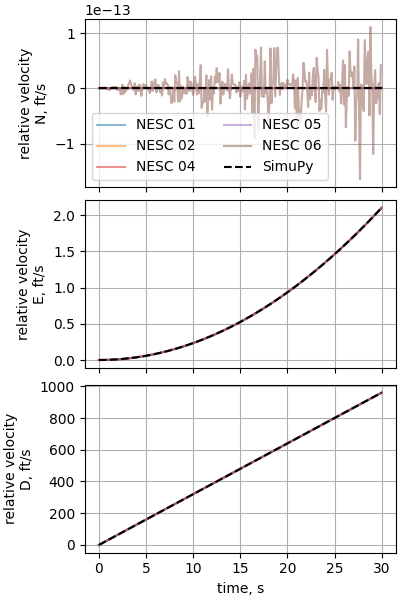
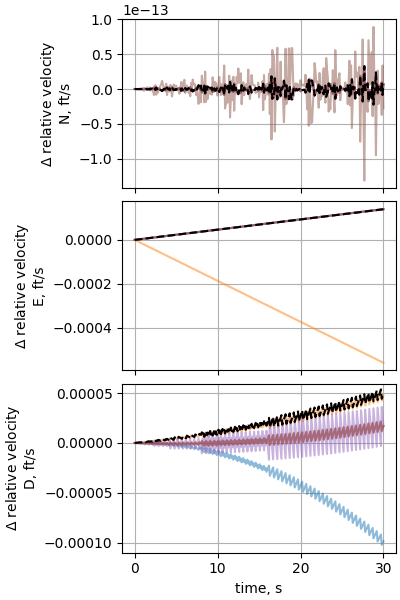
Case 2: Tumbling brick with no damping or drag
Verifies |
Rotational EOMs |
Gravitation |
J2 |
Geodesy |
WGS-84 rotating |
Atmosphere |
US 1976 STD |
Winds |
still air |
Vehicle |
Dragless rotating brick |
Notes |
Damping and drag coefficients set to zero |
from simupy.block_diagram import BlockDiagram
import simupy_flight
import numpy as np
from nesc_testcase_helper import plot_nesc_comparisons, int_opts, benchmark
from nesc_testcase_helper import ft_per_m, kg_per_slug
planet = simupy_flight.Planet(
gravity=simupy_flight.earth_J2_gravity,
winds=simupy_flight.get_constant_winds(),
atmosphere=simupy_flight.get_constant_atmosphere(),
planetodetics=simupy_flight.Planetodetic(
a=simupy_flight.earth_equitorial_radius,
omega_p=simupy_flight.earth_rotation_rate,
f=simupy_flight.earth_f,
),
)
The inertial forces due to rotation needed to be modeled with a vehicle
Ixx = 0.001894220 * kg_per_slug / (ft_per_m**2) # slug-ft2
Iyy = 0.006211019 * kg_per_slug / (ft_per_m**2) # slug-ft2
Izz = 0.007194665 * kg_per_slug / (ft_per_m**2) # slug-ft2
Ixy = 0.0 * kg_per_slug / (ft_per_m**2) # slug-ft2
Iyz = 0.0 * kg_per_slug / (ft_per_m**2) # slug-ft2
Izx = 0.0 * kg_per_slug / (ft_per_m**2) # slug-ft2
m = 0.155404754 * kg_per_slug # slug
x = 0.0
y = 0.0
z = 0.0
vehicle = simupy_flight.Vehicle(
base_aero_coeffs=simupy_flight.get_constant_aero(),
m=m,
I_xx=Ixx,
I_yy=Iyy,
I_zz=Izz,
I_xy=Ixy,
I_yz=Iyz,
I_xz=Izx,
x_com=x,
y_com=y,
z_com=z,
x_mrc=x,
y_mrc=y,
z_mrc=z,
S_A=0.0,
a_l=1.0,
b_l=1.0,
c_l=1.0,
d_l=0.0,
)
BD = BlockDiagram(planet, vehicle)
BD.connect(planet, vehicle, inputs=np.arange(planet.dim_output))
BD.connect(vehicle, planet, inputs=np.arange(vehicle.dim_output))
lat_ic = 0.0 * np.pi / 180
long_ic = 0.0 * np.pi / 180
h_ic = 30_000 / ft_per_m
V_N_ic = 0.0
V_E_ic = 0.0
V_D_ic = 0.0
psi_ic = 0.0 * np.pi / 180
theta_ic = 0.0 * np.pi / 180
phi_ic = 0.0 * np.pi / 180
omega_X_ic = 10.0 * np.pi / 180
omega_Y_ic = 20.0 * np.pi / 180
omega_Z_ic = 30.0 * np.pi / 180
planet.initial_condition = planet.ic_from_planetodetic(
long_ic, lat_ic, h_ic, V_N_ic, V_E_ic, V_D_ic, psi_ic, theta_ic, phi_ic
)
# The specification is for inertial angular rate, not relative
planet.initial_condition[-3:] = omega_X_ic, omega_Y_ic, omega_Z_ic
with benchmark() as b:
res = BD.simulate(30, integrator_options=int_opts)
plot_nesc_comparisons(res, "02")
/home/runner/work/simupy-flight/simupy-flight/simupy_flight/kinematics.py:198: RuntimeWarning: invalid value encountered in scalar divide
x60 = x6*(2*x26*x54 + x58*(-x13 + x14) + x59*(x33 + x55))/x53
/home/runner/work/simupy-flight/simupy-flight/simupy_flight/dynamics.py:22: RuntimeWarning: divide by zero encountered in scalar divide
x15 = numpy.select([numpy.greater(V_T, 0.0)], [(1/2)/V_T], default=0.0)
/home/runner/work/simupy-flight/simupy-flight/simupy_flight/kinematics.py:198: RuntimeWarning: divide by zero encountered in scalar divide
x60 = x6*(2*x26*x54 + x58*(-x13 + x14) + x59*(x33 + x55))/x53
time to simulate: 1.626 s
Total running time of the script: (0 minutes 6.294 seconds)