|
NASA Astrobee Robot Software
0.19.1
Flight software for the Astrobee robots operating inside the International Space Station.
|
|
NASA Astrobee Robot Software
0.19.1
Flight software for the Astrobee robots operating inside the International Space Station.
|
#include <ff_common/init.h>#include <gflags/gflags.h>#include <gflags/gflags_completions.h>#include <smart_dock/smart_dock.h>#include <algorithm>#include <cerrno>#include <cstring>#include <ctime>#include <fstream>#include <iomanip>#include <iostream>#include <map>#include <sstream>#include <string>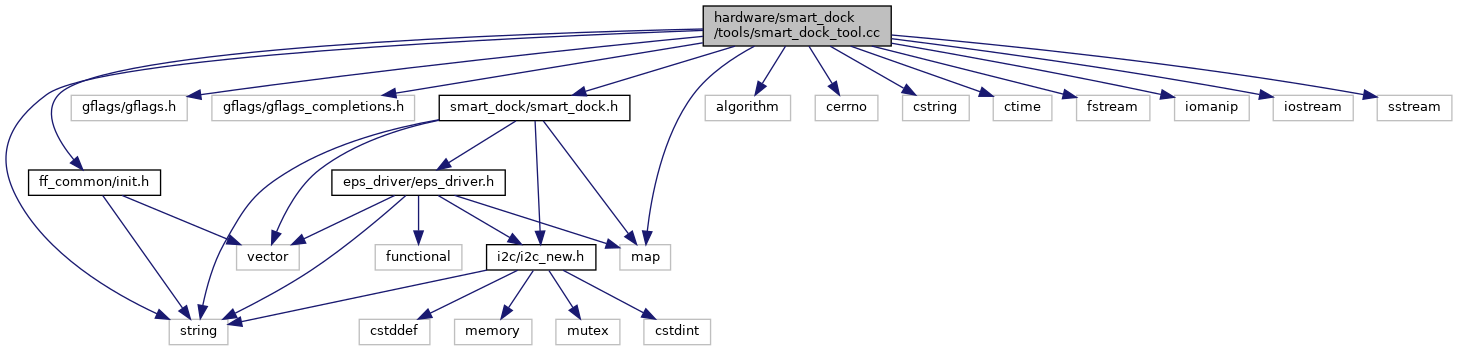
Typedefs | |
| typedef std::vector< std::string > | Keywords |
| typedef std::pair< std::string, Keywords > | Value |
| typedef std::map< uint32_t, Value > | ValueMap |
| using | SD = smart_dock::SmartDock |
| using | EPS = eps_driver::EPS |
Functions | |
| DEFINE_string (device, "/dev/i2c-2", "i2c bus of smart dock") | |
| DEFINE_int32 (address, 0x42, "i2c address of smart dock") | |
| DEFINE_int32 (retries, 3, "i2c retries") | |
| DEFINE_bool (state, false, "Get the state of the dock") | |
| DEFINE_bool (reboot, false, "Reboot") | |
| DEFINE_bool (hk, false, "View housekeeping information") | |
| DEFINE_bool (string, false, "View string information") | |
| DEFINE_bool (fault, false, "View and clear faults") | |
| DEFINE_bool (power, false, "View and toggle power channels") | |
| DEFINE_bool (berth, false, "View berth information") | |
| DEFINE_bool (command, false, "Send a command to a berth") | |
| DEFINE_bool (led, false, "Configure LEDs") | |
| DEFINE_string (set, "", "Set a new value for all specified indexes") | |
| DEFINE_bool (get, false, "Get the current value for all specified indexes") | |
| DEFINE_bool (list, false, "List all indexes and keys for the given command") | |
| DEFINE_bool (clear, false, "Send a clear command (only for -fault)") | |
| int | Error (std::string const &msg, int code=-1) |
| int | Print (std::string const &msg) |
| int | Print (std::string const &title, ValueMap const &values, bool ro=false) |
| int | HelpView (std::string const &flag, std::string const &desc, bool i=true) |
| int | HelpConf (std::string const &flag, std::string const &desc, bool i=true) |
| int | Help () |
| bool | Mask (ValueMap const &values, std::vector< std::string > const &idxs, uint32_t &mask, bool allow_all_to_be_selected=true) |
| bool | Valid (ValueMap const &values, std::string const &input, uint32_t &val) |
| int | main (int argc, char **argv) |
| using EPS = eps_driver::EPS |
| typedef std::vector<std::string> Keywords |
| using SD = smart_dock::SmartDock |
| DEFINE_bool | ( | berth | , |
| false | , | ||
| "View berth information" | |||
| ) |
| DEFINE_bool | ( | clear | , |
| false | , | ||
| "Send a clear command (only for -fault)" | |||
| ) |
| DEFINE_bool | ( | command | , |
| false | , | ||
| "Send a command to a berth" | |||
| ) |
| DEFINE_bool | ( | fault | , |
| false | , | ||
| "View and clear faults" | |||
| ) |
| DEFINE_bool | ( | get | , |
| false | , | ||
| "Get the current value for all specified indexes" | |||
| ) |
| DEFINE_bool | ( | hk | , |
| false | , | ||
| "View housekeeping information" | |||
| ) |
| DEFINE_bool | ( | led | , |
| false | , | ||
| "Configure LEDs" | |||
| ) |
| DEFINE_bool | ( | list | , |
| false | , | ||
| "List all indexes and keys for the given command" | |||
| ) |
| DEFINE_bool | ( | power | , |
| false | , | ||
| "View and toggle power channels" | |||
| ) |
| DEFINE_bool | ( | reboot | , |
| false | , | ||
| "Reboot" | |||
| ) |
| DEFINE_bool | ( | string | , |
| false | , | ||
| "View string information" | |||
| ) |
| DEFINE_int32 | ( | address | , |
| 0x42 | , | ||
| "i2c address of smart dock" | |||
| ) |
| DEFINE_int32 | ( | retries | , |
| 3 | , | ||
| "i2c retries" | |||
| ) |
| DEFINE_string | ( | device | , |
| "/dev/i2c-2" | , | ||
| "i2c bus of smart dock" | |||
| ) |
| DEFINE_string | ( | set | , |
| "" | , | ||
| "Set a new value for all specified indexes" | |||
| ) |
| int Error | ( | std::string const & | msg, |
| int | code = -1 |
||
| ) |
| int Help | ( | ) |
| int HelpConf | ( | std::string const & | flag, |
| std::string const & | desc, | ||
| bool | i = true |
||
| ) |
| int HelpView | ( | std::string const & | flag, |
| std::string const & | desc, | ||
| bool | i = true |
||
| ) |
| int main | ( | int | argc, |
| char ** | argv | ||
| ) |
| bool Mask | ( | ValueMap const & | values, |
| std::vector< std::string > const & | idxs, | ||
| uint32_t & | mask, | ||
| bool | allow_all_to_be_selected = true |
||
| ) |
| int Print | ( | std::string const & | msg | ) |
| int Print | ( | std::string const & | title, |
| ValueMap const & | values, | ||
| bool | ro = false |
||
| ) |
| bool Valid | ( | ValueMap const & | values, |
| std::string const & | input, | ||
| uint32_t & | val | ||
| ) |