#include <gurobi_trajectory.h>
|
| | LegendreTrajectory (GRBModel *model_, const std::vector< decimal_t > dts_, int degree, PolyType polytype, int order=3) |
| |
| | ~LegendreTrajectory () |
| |
| void | addMaximumBound (decimal_t bound, uint derr) |
| |
| bool | recoverVars (decimal_t ratio=1.0) |
| |
| bool | recoverVarsF (decimal_t ratio=1.0) |
| |
| bool | evaluate (decimal_t t, uint derr, VecD &out) const |
| |
| decimal_t | getTotalTime () const |
| |
| void | addVolumeContraints (const Mat4Vec &constr) |
| |
| void | addAxbConstraints (const std::vector< MatD > &A, const std::vector< VecD > &b, const std::vector< decimal_t > &ds) |
| |
| void | addWayPointConstrains (const std::vector< Waypoint > &waypnts, bool use_v0) |
| |
| decimal_t | getCost () |
| |
| bool | adjustTimes (decimal_t epsilon) |
| |
| void | adjustTimeToMaxs (decimal_t max_vel, decimal_t max_acc, decimal_t max_jrk, bool use_v0, decimal_t v0) |
| |
| VecD | check_max_violation (decimal_t max_vel, decimal_t max_acc, decimal_t max_jrk) |
| |
| void | resetConstr (bool lp=false) |
| |
| void | setQuadraticCost () |
| |
| void | setLinearCost () |
| |
| void | setCost (bool lp) |
| |
| virtual TrajData | serialize () |
| |
| void | addConvexificationConstraints (const MatD &Aobs, const VecD &bobs, const MatD &Aenv, const VecD &benv) |
| |
| void | setSlackCost () |
| |
| void | setConParam (ConstraintMode mode, int num) |
| |
| void | resetConstrVision (const MatD &points, decimal_t weight) |
| |
| void | getJacobian (const MatD &norm_pnts, decimal_t weight_loss, VecD &J) |
| |
| decimal_t | getCostV (const MatD &points, decimal_t weight) |
| |
| bool | check_max (decimal_t max_vel, decimal_t max_acc, decimal_t max_jrk) |
| |
| virtual | ~Trajectory () |
| |
| decimal_t | getExecuteTime () const |
| |
| bool | getCommand (decimal_t t, uint num_derivatives, MatD &data) |
| |
| void | setDim (uint ndim) |
| |
| void | setExecuteTime (decimal_t t) |
| |
◆ LegendreTrajectory()
| traj_opt::LegendreTrajectory::LegendreTrajectory |
( |
GRBModel * |
model_, |
|
|
const std::vector< decimal_t > |
dts_, |
|
|
int |
degree, |
|
|
PolyType |
polytype, |
|
|
int |
order = 3 |
|
) |
| |
◆ ~LegendreTrajectory()
| traj_opt::LegendreTrajectory::~LegendreTrajectory |
( |
| ) |
|
◆ addAxbConstraints()
| void traj_opt::LegendreTrajectory::addAxbConstraints |
( |
const std::vector< MatD > & |
A, |
|
|
const std::vector< VecD > & |
b, |
|
|
const std::vector< decimal_t > & |
ds |
|
) |
| |
◆ addConvexificationConstraints()
| void traj_opt::LegendreTrajectory::addConvexificationConstraints |
( |
const MatD & |
Aobs, |
|
|
const VecD & |
bobs, |
|
|
const MatD & |
Aenv, |
|
|
const VecD & |
benv |
|
) |
| |
◆ addMaximumBound()
| void traj_opt::LegendreTrajectory::addMaximumBound |
( |
decimal_t |
bound, |
|
|
uint |
derr |
|
) |
| |
◆ addVolumeContraints()
| void traj_opt::LegendreTrajectory::addVolumeContraints |
( |
const Mat4Vec & |
constr | ) |
|
◆ addWayPointConstrains()
| void traj_opt::LegendreTrajectory::addWayPointConstrains |
( |
const std::vector< Waypoint > & |
waypnts, |
|
|
bool |
use_v0 |
|
) |
| |
◆ adjustTimes()
| bool traj_opt::LegendreTrajectory::adjustTimes |
( |
decimal_t |
epsilon | ) |
|
◆ adjustTimeToMaxs()
◆ check_max()
◆ check_max_violation()
◆ evaluate()
| bool traj_opt::LegendreTrajectory::evaluate |
( |
decimal_t |
t, |
|
|
uint |
derr, |
|
|
VecD & |
out |
|
) |
| const |
|
virtual |
◆ getCost()
| decimal_t traj_opt::LegendreTrajectory::getCost |
( |
| ) |
|
|
virtual |
◆ getCostV()
◆ getJacobian()
| void traj_opt::LegendreTrajectory::getJacobian |
( |
const MatD & |
norm_pnts, |
|
|
decimal_t |
weight_loss, |
|
|
VecD & |
J |
|
) |
| |
◆ getTotalTime()
| decimal_t traj_opt::LegendreTrajectory::getTotalTime |
( |
| ) |
const |
|
virtual |
◆ recoverVars()
| bool traj_opt::LegendreTrajectory::recoverVars |
( |
decimal_t |
ratio = 1.0 | ) |
|
◆ recoverVarsF()
| bool traj_opt::LegendreTrajectory::recoverVarsF |
( |
decimal_t |
ratio = 1.0 | ) |
|
◆ resetConstr()
| void traj_opt::LegendreTrajectory::resetConstr |
( |
bool |
lp = false | ) |
|
◆ resetConstrVision()
| void traj_opt::LegendreTrajectory::resetConstrVision |
( |
const MatD & |
points, |
|
|
decimal_t |
weight |
|
) |
| |
◆ serialize()
| virtual TrajData traj_opt::LegendreTrajectory::serialize |
( |
| ) |
|
|
virtual |
◆ setConParam()
| void traj_opt::LegendreTrajectory::setConParam |
( |
ConstraintMode |
mode, |
|
|
int |
num |
|
) |
| |
|
inline |
◆ setCost()
| void traj_opt::LegendreTrajectory::setCost |
( |
bool |
lp | ) |
|
◆ setLinearCost()
| void traj_opt::LegendreTrajectory::setLinearCost |
( |
| ) |
|
◆ setQuadraticCost()
| void traj_opt::LegendreTrajectory::setQuadraticCost |
( |
| ) |
|
◆ setSlackCost()
| void traj_opt::LegendreTrajectory::setSlackCost |
( |
| ) |
|
◆ individual_sections
| std::vector<boost::shared_ptr<TrajSection4D> > traj_opt::LegendreTrajectory::individual_sections |
The documentation for this class was generated from the following file:
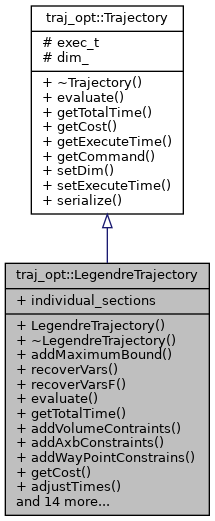
 Public Member Functions inherited from traj_opt::Trajectory
Public Member Functions inherited from traj_opt::Trajectory