|
| void | Initialize (ros::NodeHandle *nh) |
| |
| int16_t | CnvTo (ConversionType type, double value) |
| |
| double | CnvFrom (ConversionType type, int32_t value) |
| |
| void | SleepCallback (uint32_t ms) |
| |
| void | DataCallback (PerchingArmRaw const &raw) |
| |
| void | GoalCallback (sensor_msgs::JointState const &msg) |
| |
| bool | EnableArmCallback (ff_hw_msgs::SetEnabled::Request &req, ff_hw_msgs::SetEnabled::Response &res) |
| |
| bool | SetDistVelCallback (ff_hw_msgs::SetJointMaxVelocity::Request &req, ff_hw_msgs::SetJointMaxVelocity::Response &res) |
| |
| bool | SetProxVelCallback (ff_hw_msgs::SetJointMaxVelocity::Request &req, ff_hw_msgs::SetJointMaxVelocity::Response &res) |
| |
| bool | EnableProximalServoCallback (ff_hw_msgs::SetEnabled::Request &req, ff_hw_msgs::SetEnabled::Response &res) |
| |
| bool | EnableDistalServoCallback (ff_hw_msgs::SetEnabled::Request &req, ff_hw_msgs::SetEnabled::Response &res) |
| |
| bool | EnableGripperServoCallback (ff_hw_msgs::SetEnabled::Request &req, ff_hw_msgs::SetEnabled::Response &res) |
| |
| bool | CalibrateGripperCallback (ff_hw_msgs::CalibrateGripper::Request &req, ff_hw_msgs::CalibrateGripper::Response &res) |
| |
| virtual void | Reset () |
| |
| virtual void | Sleep () |
| |
| virtual void | Wakeup () |
| |
| void | StopHeartbeat () |
| |
| void | SendDiagnostics (const std::vector< diagnostic_msgs::KeyValue > &keyval) |
| |
| void | Setup (ros::NodeHandle &nh, ros::NodeHandle &nh_mt, std::string plugin_name) |
| |
◆ ConversionType
| Enumerator |
|---|
| POSITION | |
| VELOCITY | |
| PERCENTAGE | |
| POWER | |
| GRIPPER_L_PROX | |
| GRIPPER_L_DIST | |
| GRIPPER_R_PROX | |
| GRIPPER_R_DIST | |
◆ PerchingArmNode()
| perching_arm::PerchingArmNode::PerchingArmNode |
( |
| ) |
|
|
inline |
◆ ~PerchingArmNode()
| perching_arm::PerchingArmNode::~PerchingArmNode |
( |
| ) |
|
|
inline |
◆ CalibrateGripperCallback()
| bool perching_arm::PerchingArmNode::CalibrateGripperCallback |
( |
ff_hw_msgs::CalibrateGripper::Request & |
req, |
|
|
ff_hw_msgs::CalibrateGripper::Response & |
res |
|
) |
| |
|
inlineprotected |
◆ CnvFrom()
| double perching_arm::PerchingArmNode::CnvFrom |
( |
ConversionType |
type, |
|
|
int32_t |
value |
|
) |
| |
|
inlineprotected |
◆ CnvTo()
| int16_t perching_arm::PerchingArmNode::CnvTo |
( |
ConversionType |
type, |
|
|
double |
value |
|
) |
| |
|
inlineprotected |
◆ DataCallback()
| void perching_arm::PerchingArmNode::DataCallback |
( |
PerchingArmRaw const & |
raw | ) |
|
|
inlineprotected |
◆ EnableArmCallback()
| bool perching_arm::PerchingArmNode::EnableArmCallback |
( |
ff_hw_msgs::SetEnabled::Request & |
req, |
|
|
ff_hw_msgs::SetEnabled::Response & |
res |
|
) |
| |
|
inlineprotected |
◆ EnableDistalServoCallback()
| bool perching_arm::PerchingArmNode::EnableDistalServoCallback |
( |
ff_hw_msgs::SetEnabled::Request & |
req, |
|
|
ff_hw_msgs::SetEnabled::Response & |
res |
|
) |
| |
|
inlineprotected |
◆ EnableGripperServoCallback()
| bool perching_arm::PerchingArmNode::EnableGripperServoCallback |
( |
ff_hw_msgs::SetEnabled::Request & |
req, |
|
|
ff_hw_msgs::SetEnabled::Response & |
res |
|
) |
| |
|
inlineprotected |
◆ EnableProximalServoCallback()
| bool perching_arm::PerchingArmNode::EnableProximalServoCallback |
( |
ff_hw_msgs::SetEnabled::Request & |
req, |
|
|
ff_hw_msgs::SetEnabled::Response & |
res |
|
) |
| |
|
inlineprotected |
◆ GoalCallback()
| void perching_arm::PerchingArmNode::GoalCallback |
( |
sensor_msgs::JointState const & |
msg | ) |
|
|
inlineprotected |
◆ Initialize()
| void perching_arm::PerchingArmNode::Initialize |
( |
ros::NodeHandle * |
nh | ) |
|
|
inlineprotectedvirtual |
◆ SetDistVelCallback()
| bool perching_arm::PerchingArmNode::SetDistVelCallback |
( |
ff_hw_msgs::SetJointMaxVelocity::Request & |
req, |
|
|
ff_hw_msgs::SetJointMaxVelocity::Response & |
res |
|
) |
| |
|
inlineprotected |
◆ SetProxVelCallback()
| bool perching_arm::PerchingArmNode::SetProxVelCallback |
( |
ff_hw_msgs::SetJointMaxVelocity::Request & |
req, |
|
|
ff_hw_msgs::SetJointMaxVelocity::Response & |
res |
|
) |
| |
|
inlineprotected |
◆ SleepCallback()
| void perching_arm::PerchingArmNode::SleepCallback |
( |
uint32_t |
ms | ) |
|
|
inlineprotected |
The documentation for this class was generated from the following file:
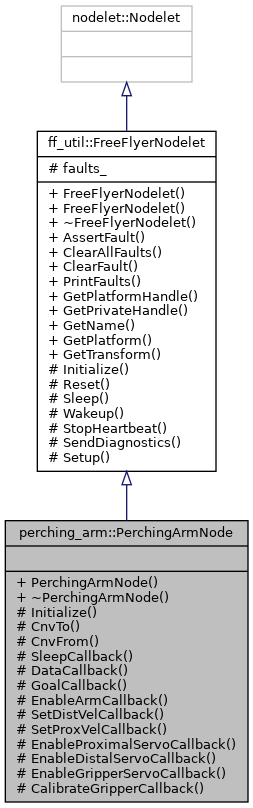
 Public Member Functions inherited from ff_util::FreeFlyerNodelet
Public Member Functions inherited from ff_util::FreeFlyerNodelet