|
NASA Astrobee Robot Software
0.19.1
Flight software for the Astrobee robots operating inside the International Space Station.
|
|
NASA Astrobee Robot Software
0.19.1
Flight software for the Astrobee robots operating inside the International Space Station.
|
#include <correspondence_rejection_surface_normal2.h>
Public Types | |
| typedef boost::shared_ptr< CorrespondenceRejectorSurfaceNormal2 > | Ptr |
| typedef boost::shared_ptr< const CorrespondenceRejectorSurfaceNormal2 > | ConstPtr |
Public Member Functions | |
| CorrespondenceRejectorSurfaceNormal2 () | |
| Empty constructor. Sets the threshold to 1.0. More... | |
| void | setThreshold (double threshold) |
| Get a list of valid correspondences after rejection from the original set of correspondences. More... | |
| double | getThreshold () const |
| Get the thresholding angle between the normals for correspondence rejection. More... | |
| void | getRemainingCorrespondences (const pcl::Correspondences &original_correspondences, pcl::Correspondences &remaining_correspondences) |
| void | initializeDataContainer () |
| Initialize the data container object for the point type and the normal type. More... | |
| void | setInputCloud (const typename pcl::PointCloud< PointWithNormalT >::ConstPtr &input) |
| Provide a source point cloud dataset (must contain XYZ data!), used to compute the correspondence distance. More... | |
| void | setInputSource (const typename pcl::PointCloud< PointWithNormalT >::ConstPtr &input) |
| Provide a source point cloud dataset (must contain XYZ data!), used to compute the correspondence distance. More... | |
| pcl::PointCloud< PointWithNormalT >::ConstPtr | getInputSource () const |
| Get the target input point cloud. More... | |
| void | setInputTarget (const typename pcl::PointCloud< PointWithNormalT >::ConstPtr &target) |
| Provide a target point cloud dataset (must contain XYZ data!), used to compute the correspondence distance. More... | |
| void | setSearchMethodTarget (const boost::shared_ptr< pcl::search::KdTree< PointWithNormalT > > &tree, bool force_no_recompute=false) |
| Provide a pointer to the search object used to find correspondences in the target cloud. More... | |
| pcl::PointCloud< PointWithNormalT >::ConstPtr | getInputTarget () const |
| Get the target input point cloud. More... | |
| void | setInputNormals (const typename pcl::PointCloud< PointWithNormalT >::ConstPtr &normals) |
| Set the normals computed on the input point cloud. More... | |
| pcl::PointCloud< PointWithNormalT >::Ptr | getInputNormals () const |
| Get the normals computed on the input point cloud. More... | |
| void | setTargetNormals (const typename pcl::PointCloud< PointWithNormalT >::ConstPtr &normals) |
| Set the normals computed on the target point cloud. More... | |
| pcl::PointCloud< PointWithNormalT >::Ptr | getTargetNormals () const |
| Get the normals computed on the target point cloud. More... | |
| bool | requiresSourcePoints () const |
| See if this rejector requires source points. More... | |
| void | setSourcePoints (pcl::PCLPointCloud2::ConstPtr cloud2) |
| Blob method for setting the source cloud. More... | |
| bool | requiresTargetPoints () const |
| See if this rejector requires a target cloud. More... | |
| void | setTargetPoints (pcl::PCLPointCloud2::ConstPtr cloud2) |
| Method for setting the target cloud. More... | |
| bool | requiresSourceNormals () const |
| See if this rejector requires source normals. More... | |
| void | setSourceNormals (pcl::PCLPointCloud2::ConstPtr cloud2) |
| Blob method for setting the source normals. More... | |
| bool | requiresTargetNormals () const |
| See if this rejector requires target normals. More... | |
| void | setTargetNormals (pcl::PCLPointCloud2::ConstPtr cloud2) |
| Method for setting the target normals. More... | |
Protected Types | |
| typedef boost::shared_ptr< DataContainerInterface > | DataContainerPtr |
Protected Member Functions | |
| void | applyRejection (pcl::Correspondences &correspondences) |
| Apply the rejection algorithm. More... | |
Protected Attributes | |
| double | threshold_ |
| The median distance threshold between two correspondent points in source <-> target. More... | |
| DataContainerPtr | data_container_ |
| A pointer to the DataContainer object containing the input and target point clouds. More... | |
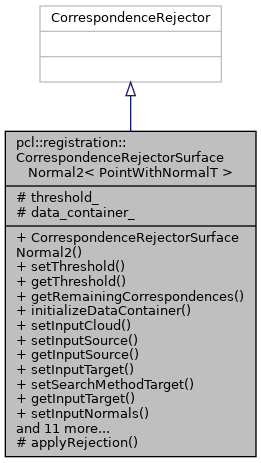
CorrespondenceRejectorSurfaceNormal2 implements a simple correspondence rejection method based on the angle between the normals at correspondent points.
| typedef boost::shared_ptr<const CorrespondenceRejectorSurfaceNormal2> pcl::registration::CorrespondenceRejectorSurfaceNormal2< PointWithNormalT >::ConstPtr |
|
protected |
| typedef boost::shared_ptr<CorrespondenceRejectorSurfaceNormal2> pcl::registration::CorrespondenceRejectorSurfaceNormal2< PointWithNormalT >::Ptr |
|
inline |
Empty constructor. Sets the threshold to 1.0.
|
inlineprotected |
Apply the rejection algorithm.
| [out] | correspondences | the set of resultant correspondences. |
|
inline |
Get the normals computed on the input point cloud.
|
inline |
Get the target input point cloud.
|
inline |
Get the target input point cloud.
|
inline |
|
inline |
Get the normals computed on the target point cloud.
|
inline |
Get the thresholding angle between the normals for correspondence rejection.
|
inline |
Initialize the data container object for the point type and the normal type.
|
inline |
See if this rejector requires source normals.
|
inline |
See if this rejector requires source points.
|
inline |
See if this rejector requires target normals.
|
inline |
See if this rejector requires a target cloud.
|
inline |
Provide a source point cloud dataset (must contain XYZ data!), used to compute the correspondence distance.
| [in] | input | a cloud containing XYZ data |
|
inline |
Set the normals computed on the input point cloud.
| [in] | normals | the normals computed for the input cloud |
|
inline |
Provide a source point cloud dataset (must contain XYZ data!), used to compute the correspondence distance.
| [in] | input | a cloud containing XYZ data |
|
inline |
Provide a target point cloud dataset (must contain XYZ data!), used to compute the correspondence distance.
| [in] | target | a cloud containing XYZ data |
|
inline |
Provide a pointer to the search object used to find correspondences in the target cloud.
| [in] | tree | a pointer to the spatial search object. |
| [in] | force_no_recompute | If set to true, this tree will NEVER be recomputed, regardless of calls to setInputTarget. Only use if you are confident that the tree will be set correctly. |
|
inline |
Blob method for setting the source normals.
|
inline |
Blob method for setting the source cloud.
|
inline |
Set the normals computed on the target point cloud.
| [in] | normals | the normals computed for the input cloud |
|
inline |
Method for setting the target normals.
|
inline |
Method for setting the target cloud.
|
inline |
Get a list of valid correspondences after rejection from the original set of correspondences.
| [in] | original_correspondences | the set of initial correspondences given |
| [out] | remaining_correspondences | the resultant filtered set of remaining correspondences |
Set the thresholding angle between the normals for correspondence rejection.
| [in] | threshold | cosine of the thresholding angle between the normals for rejection |
|
protected |
A pointer to the DataContainer object containing the input and target point clouds.
|
protected |
The median distance threshold between two correspondent points in source <-> target.