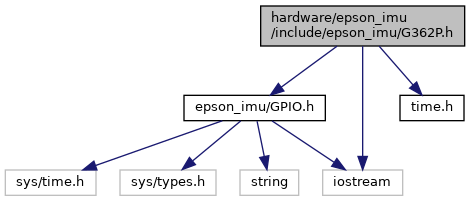
#include <epson_imu/GPIO.h>
#include <time.h>
#include <iostream>
Go to the source code of this file.
|
| enum | epson_imu::Mode { epson_imu::SAMPLING = 0x00,
epson_imu::CONFIGURATION = 0x01
} |
| |
| enum | epson_imu::Window { epson_imu::WIN0 = 0x00,
epson_imu::WIN1 = 0x01
} |
| |
| enum | epson_imu::OutputBits { epson_imu::B16 = 0,
epson_imu::B32 = 1
} |
| |
| enum | epson_imu::Filter {
epson_imu::MOV_AVG_TAP_2 = 0x01,
epson_imu::MOV_AVG_TAP_4 = 0x02,
epson_imu::MOV_AVG_TAP_8 = 0x03,
epson_imu::MOV_AVG_TAP_16 = 0x04,
epson_imu::MOV_AVG_TAP_32 = 0x05,
epson_imu::MOV_AVG_TAP_64 = 0x06,
epson_imu::MOV_AVG_TAP_128 = 0x07,
epson_imu::FIR_TAP_32_FC_50 = 0x08,
epson_imu::FIR_TAP_32_FC_100 = 0x09,
epson_imu::FIR_TAP_32_FC_200 = 0x0A,
epson_imu::FIR_TAP_32_FC_400 = 0x0B,
epson_imu::FIR_TAP_64_FC_50 = 0x0C,
epson_imu::FIR_TAP_64_FC_100 = 0x0D,
epson_imu::FIR_TAP_64_FC_200 = 0x0E,
epson_imu::FIR_TAP_64_FC_400 = 0x0F,
epson_imu::FIR_TAP_128_FC_50 = 0x10,
epson_imu::FIR_TAP_128_FC_100 = 0x11,
epson_imu::FIR_TAP_128_FC_200 = 0x12,
epson_imu::FIR_TAP_128_FC_400 = 0x13
} |
| |
| enum | epson_imu::SamplingRate {
epson_imu::SPS2000 = 0x01,
epson_imu::SPS1000 = 0x02,
epson_imu::SPS500 = 0x03,
epson_imu::SPS250 = 0x04,
epson_imu::SPS125 = 0x05,
epson_imu::SPS62_5 = 0x06,
epson_imu::SPS31_25 = 0x07
} |
| |
◆ ARRAY_SIZE
| #define ARRAY_SIZE |
( |
|
a | ) |
(sizeof(a) / sizeof((a)[0])) |
◆ CHECK_REG_VALUE
| #define CHECK_REG_VALUE 1 |
◆ EPSON_POWER_ON_DELAY
| #define EPSON_POWER_ON_DELAY 800000 |
◆ REG_BURST_CTRL1_H
| #define REG_BURST_CTRL1_H 0x0C |
◆ REG_BURST_CTRL1_L
| #define REG_BURST_CTRL1_L 0x0D |
◆ REG_BURST_CTRL2_H
| #define REG_BURST_CTRL2_H 0x0E |
◆ REG_BURST_CTRL2_L
| #define REG_BURST_CTRL2_L 0x0F |
◆ REG_BURST_H
◆ REG_BURST_L
◆ REG_COUNT
◆ REG_DIAG_STAT_H
| #define REG_DIAG_STAT_H 0x04 |
◆ REG_DIAG_STAT_L
| #define REG_DIAG_STAT_L 0x05 |
◆ REG_FILTER_CTRL_H
| #define REG_FILTER_CTRL_H 0x06 |
◆ REG_FILTER_CTRL_L
| #define REG_FILTER_CTRL_L 0x07 |
◆ REG_FLAG_H
◆ REG_FLAG_L
◆ REG_GLOB_CMD_H
| #define REG_GLOB_CMD_H 0x0A |
◆ REG_GLOB_CMD_L
| #define REG_GLOB_CMD_L 0x0B |
◆ REG_GPIO_H
◆ REG_GPIO_L
◆ REG_MODE_CTRL_H
| #define REG_MODE_CTRL_H 0x02 |
◆ REG_MODE_CTRL_L
| #define REG_MODE_CTRL_L 0x03 |
◆ REG_MSC_CTRL_H
| #define REG_MSC_CTRL_H 0x02 |
◆ REG_MSC_CTRL_L
| #define REG_MSC_CTRL_L 0x03 |
◆ REG_SIG_CTRL_H
| #define REG_SIG_CTRL_H 0x00 |
◆ REG_SIG_CTRL_L
| #define REG_SIG_CTRL_L 0x01 |
◆ REG_SMPL_CTRL_H
| #define REG_SMPL_CTRL_H 0x04 |
◆ REG_SMPL_CTRL_L
| #define REG_SMPL_CTRL_L 0x05 |
◆ REG_TEMP_HIGH
| #define REG_TEMP_HIGH 0x0E |
◆ REG_TEMP_LOW
| #define REG_TEMP_LOW 0x10 |
◆ REG_UART_CTRL_H
| #define REG_UART_CTRL_H 0x08 |
◆ REG_UART_CTRL_L
| #define REG_UART_CTRL_L 0x09 |
◆ REG_WIN_CTRL_H
| #define REG_WIN_CTRL_H 0x7E |
◆ REG_WIN_CTRL_L
| #define REG_WIN_CTRL_L 0x7F |
◆ REG_XACCL_HIGH
| #define REG_XACCL_HIGH 0x1E |
◆ REG_XACCL_LOW
| #define REG_XACCL_LOW 0x20 |
◆ REG_XGYRO_HIGH
| #define REG_XGYRO_HIGH 0x12 |
◆ REG_XGYRO_LOW
| #define REG_XGYRO_LOW 0x14 |
◆ REG_YACCL_HIGH
| #define REG_YACCL_HIGH 0x22 |
◆ REG_YACCL_LOW
| #define REG_YACCL_LOW 0x24 |
◆ REG_YGYRO_HIGH
| #define REG_YGYRO_HIGH 0x16 |
◆ REG_YGYRO_LOW
| #define REG_YGYRO_LOW 0x18 |
◆ REG_ZACCL_HIGH
| #define REG_ZACCL_HIGH 0x26 |
◆ REG_ZACCL_LOW
| #define REG_ZACCL_LOW 0x28 |
◆ REG_ZGYRO_HIGH
| #define REG_ZGYRO_HIGH 0x1A |
◆ REG_ZGYRO_LOW
| #define REG_ZGYRO_LOW 0x1C |
◆ SF_ACCL
◆ SF_GYRO
◆ SF_TEMP
| #define SF_TEMP (0.0042725) |
◆ STALL_BURST_MODE_BEFORE_DATA
| #define STALL_BURST_MODE_BEFORE_DATA 45 |
◆ STALL_BURST_MODE_BETWEEN_DATA
| #define STALL_BURST_MODE_BETWEEN_DATA 5 |
◆ STALL_NORMAL_MODE
| #define STALL_NORMAL_MODE 20 |