Demonstration on Using MultiFlow and CommsFlow
This notebook is a demonstration on the use of MultiFlow and CommsFlow for the coordination of multiple devices via a single “agent”. With the exception of the graphs, the code here is identical to multiflow_demo.py with the purpose of walking people through the step-by-step creation of the model.
The model is a simple example of using fmdtools to create System of Systems or an Agent-Based model. Depending on the representation and the goal of the model, it could be considered a Multiagent System but the fundamental setup works all the same.
When using fmdtools to do this, indivudal entities known as agents are programmed as functions, while the interactions between them are built using flows. Agents can represent a variety of things such as a representation of a more complicated system (such as a drone) or a software agent that helps control the others. The flows can be interactions such as communication channels or the environment that the agents exist in. For further explanation, see this part of the documentation
The concept for this example is as follows: two mover agents move in both the x and y direction. A coordinator agent is tasked with sending the messages to tell them how to move within the environment.
Copyright © 2024, United States Government, as represented by the Administrator of the National Aeronautics and Space Administration. All rights reserved.
The “"Fault Model Design tools - fmdtools version 2"” software is licensed under the Apache License, Version 2.0 (the "License"); you may not use this file except in compliance with the License. You may obtain a copy of the License at http://www.apache.org/licenses/LICENSE-2.0.
Unless required by applicable law or agreed to in writing, software distributed under the License is distributed on an "AS IS" BASIS, WITHOUT WARRANTIES OR CONDITIONS OF ANY KIND, either express or implied. See the License for the specific language governing permissions and limitations under the License.
import inspect
Bulding Flows
The first step is creating the flows and states that connect the model. This includes using a LocationState as the default starting location. This is given to the Communications channel which uses CommsFlow to allow for communications agent, and the locaiton MultiFlow to represent an “environment”. Finally there is a parameter setup for the Mover agent, the purpose of which is elaborated on below.
from multiflow_demo import LocationState, Communications, Location, MoveParam
print(inspect.getsource(LocationState))
print(inspect.getsource(Location))
print(inspect.getsource(Communications))
print(inspect.getsource(MoveParam))
class LocationState(State):
x: float = 0.0
y: float = 0.0
class Location(MultiFlow):
container_s = LocationState
class Communications(CommsFlow):
container_s = LocationState
class MoveParam(Parameter):
x_up: float = 0.0
y_up: float = 0.0
Next is the development of the Mover agents. When the model is constructed, there will be two Movers. The first moves in the x direction and the second in the y. That is the purpose of the MoverParam and the if statement in the behavior function. When the model is initilized later, the two movers are sent parameters to turn on the x_up and y_up which determines how they move.
Other parts necessary in the model are the initiation, which requires making a communications channel and a local copy of the location to track the state. The dynamic behavior function uses the increment (inc) function to move the device in the direction needed on each step. With that same update, it makes sure that it updates it’s internal info from it’s location to ensure that it can send out the correct information to the coordinator agent.
from multiflow_demo import Mover
print(inspect.getsource(Mover))
class Mover(Function):
__slots__ = ('communications', 'location', 'internal_info', 'loc')
container_p = MoveParam
flow_communications = Communications
flow_location = Location
def init_block(self, **kwargs):
self.internal_info = self.communications.create_comms(self.name)
self.loc = self.location.create_local(self.name)
def dynamic_behavior(self, time):
# move
self.loc.s.inc(x=self.p.x_up, y=self.p.y_up)
# the inbox should be cleared each timestep to allow new messages
self.internal_info.clear_inbox()
def static_behavior(self, time):
# recieve messages
self.internal_info.receive()
# communicate
if self.p.x_up != 0.0:
self.internal_info.s.x = self.loc.s.x
self.internal_info.send("all", "x")
elif self.p.y_up != 0.0:
self.internal_info.s.y = self.loc.s.y
self.internal_info.send("all", "y")
def find_classification(self, scen, fxnhist):
return {"last_x": self.loc.s.x, "min_x": fxnhist.faulty.location.get(self.name).x}
Finally, there is the creation of the Coordinator agent. It’s main goal to allow for the transfer of information between the agents by receiving and transmiting information to the agents.
from multiflow_demo import Coordinator
print(inspect.getsource(Coordinator))
class Coordinator(Function):
__slots__ = ('communications', 'coord_view')
flow_communications = Communications
def init_block(self, **kwargs):
self.coord_view = self.communications.create_comms(self.name,
ports=["mover_1", "mover_2"])
def dynamic_behavior(self, time):
self.coord_view.clear_inbox()
def static_behavior(self, time):
self.coord_view.receive()
self.coord_view.update("y", to_update="local", to_get="mover_1")
self.coord_view.update("x", to_update="local", to_get="mover_2")
After building all the functions and flow, the entire model is put together and initialized with the correct parameters. Each flow and then function is added. Not the “p = {“x_up”:1.0}” and “p = {“y_up”:1.0} when creating the two movers. This refers back to the behavior function when making the Mover agent before, allowing for each one to behave in its own way.
from multiflow_demo import ExModel
print(inspect.getsource(ExModel))
class ExModel(FunctionArchitecture):
__slots__ = ()
default_sp = dict(end_time=10)
def init_architecture(self, **kwargs):
self.add_flow("communications", Communications)
self.add_flow("location", Location)
self.add_fxn("mover_1", Mover, "communications", "location", p={"x_up": 1.0})
self.add_fxn("mover_2", Mover, "communications", "location", p={"y_up": 1.0})
self.add_fxn("coordinator", Coordinator, "communications")
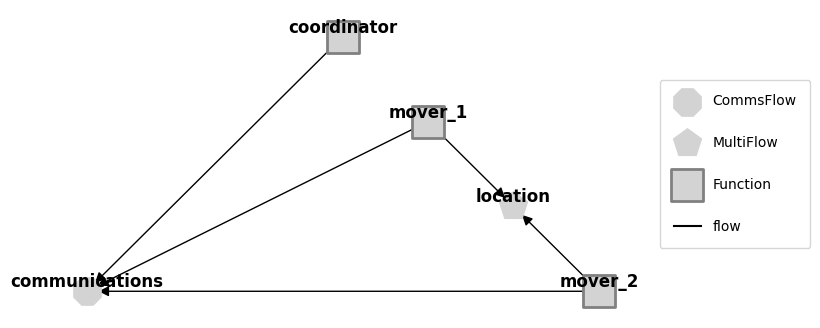
Before running the model, we start with loading up the model and using the FunctionArchitectureGraph function to view the components and their relations to eachother. The CommsFlow and MultiFlow nodes are represented by octogons and hexagons, respectively. This is different than the circle nodes in regular flows. See default_node_kwargs in fmdtools.analyze.graph for the different node shapes and colors.
from fmdtools.define.architecture.function import FunctionArchitectureGraph
mdl = ExModel()
mg = FunctionArchitectureGraph(mdl)
mg.set_edge_labels(title='')
fig, ax = mg.draw(figsize=(8,4))
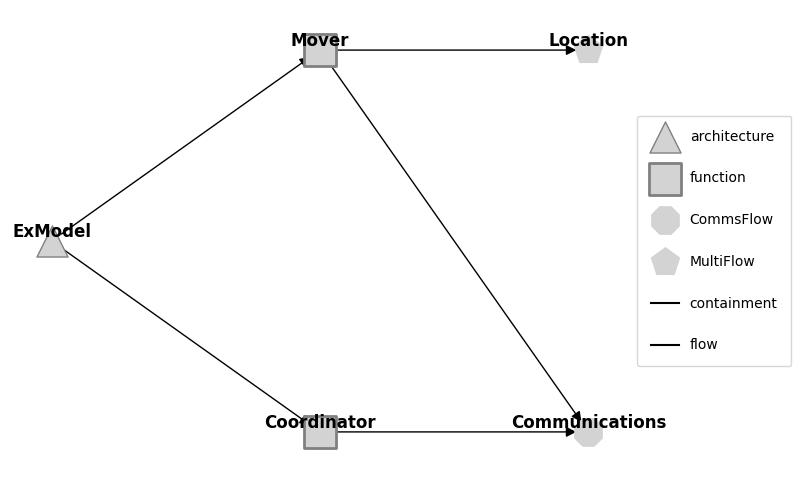
Besides the model itself, we can use FunctionArchitectureTypeGraph to create a graph representation of hte model classes, showing the containment relationship between function classes and flow classes in the model.
from fmdtools.define.architecture.function import FunctionArchitectureTypeGraph
tg = FunctionArchitectureTypeGraph(mdl)
tg.set_edge_labels(title='')
fig, ax = tg.draw(figsize=(8,6))
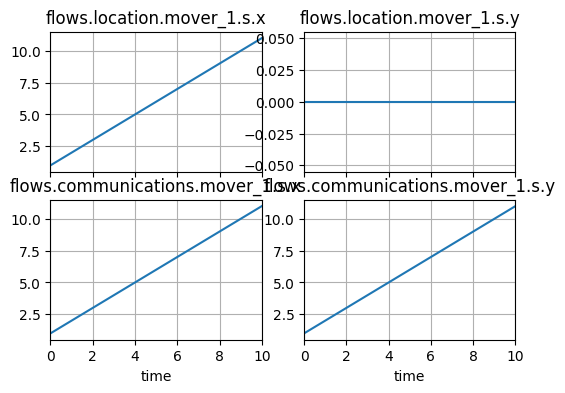
Finally, we can run the model and view it’s history via fmdtools.sim.propagate. The communication is setup such that mover_1 is supposed to go 25 and transmit that information to allow for mover_2 to do the same.
mdl.flows["communications"].mover_1.s.x=25
mdl.flows["communications"].mover_1.send("mover_2")
from fmdtools.sim import propagate
result, mdlhist = propagate.nominal(mdl,track='all', to_return={'graph': FunctionArchitectureGraph})
#fig = result.graph.draw(figsize=(8,6)) #graph can be drawn, but it's the same as before since it's nominal
mdlhist
flows.communications.s.x: array(11)
flows.communications.s.y: array(11)
flows.communications.mover_1.s.x: array(11)
flows.communications.mover_1.s.y: array(11)
flows.communications.mover_1_out.s.x: array(11)
flows.communications.mover_1_out.s.y: array(11)
flows.communications.mover_2.s.x: array(11)
flows.communications.mover_2.s.y: array(11)
flows.communications.mover_2_out.s.x: array(11)
flows.communications.mover_2_out.s.y: array(11)
flows.communications.coordinator.s.x: array(11)
flows.communications.coordinator.s.y: array(11)
flows.communications array(11)
flows.communications array(11)
flows.communications array(11)
flows.communications array(11)
flows.communications array(11)
flows.communications array(11)
flows.communications array(11)
flows.communications array(11)
flows.communications array(11)
flows.communications array(11)
flows.location.s.x: array(11)
flows.location.s.y: array(11)
flows.location.mover_1.s.x: array(11)
flows.location.mover_1.s.y: array(11)
flows.location.mover_2.s.x: array(11)
flows.location.mover_2.s.y: array(11)
time: array(11)
fig, ax = mdlhist.plot_line('flows.location.mover_1.s.x', 'flows.location.mover_1.s.y',
'flows.communications.mover_1.s.x', 'flows.communications.mover_1.s.y')