|
| void | LoadCallback (ros::NodeHandle *nh, sensors::SensorPtr sensor, sdf::ElementPtr sdf) |
| |
| void | OnExtrinsicsReceived (ros::NodeHandle *nh) |
| |
| void | ToggleCallback () |
| |
| void | Callback (const float *data, unsigned int width, unsigned height, unsigned int len, const std::string &type) |
| |
| void | Load (sensors::SensorPtr sensor, sdf::ElementPtr sdf) |
| |
| physics::WorldPtr | GetWorld () |
| |
| physics::ModelPtr | GetModel () |
| |
| std::string | GetRotationType () |
| |
| virtual bool | ExtrinsicsCallback (geometry_msgs::TransformStamped const *tf) |
| |
| void | InitializePlugin (std::string const &robot_name, std::string const &plugin_name) |
| |
| void | SetParentFrame (std::string const &parent) |
| |
| std::string | GetFrame (std::string target="", std::string delim="/") |
| |
| void | SetupExtrinsics (const ros::TimerEvent &event) |
| |
| void | CallbackThread () |
| |
| virtual void | Initialize (ros::NodeHandle *nh) |
| |
| virtual void | Reset () |
| |
| virtual void | Sleep () |
| |
| virtual void | Wakeup () |
| |
| void | StopHeartbeat () |
| |
| void | SendDiagnostics (const std::vector< diagnostic_msgs::KeyValue > &keyval) |
| |
| void | Setup (ros::NodeHandle &nh, ros::NodeHandle &nh_mt, std::string plugin_name) |
| |
◆ GazeboSensorPluginPerchCam()
| gazebo::GazeboSensorPluginPerchCam::GazeboSensorPluginPerchCam |
( |
| ) |
|
|
inline |
◆ ~GazeboSensorPluginPerchCam()
| gazebo::GazeboSensorPluginPerchCam::~GazeboSensorPluginPerchCam |
( |
| ) |
|
|
inline |
◆ Callback()
| void gazebo::GazeboSensorPluginPerchCam::Callback |
( |
const float * |
data, |
|
|
unsigned int |
width, |
|
|
unsigned |
height, |
|
|
unsigned int |
len, |
|
|
const std::string & |
type |
|
) |
| |
|
inlineprotected |
◆ LoadCallback()
| void gazebo::GazeboSensorPluginPerchCam::LoadCallback |
( |
ros::NodeHandle * |
nh, |
|
|
sensors::SensorPtr |
sensor, |
|
|
sdf::ElementPtr |
sdf |
|
) |
| |
|
inlineprotectedvirtual |
◆ OnExtrinsicsReceived()
| void gazebo::GazeboSensorPluginPerchCam::OnExtrinsicsReceived |
( |
ros::NodeHandle * |
nh | ) |
|
|
inlineprotectedvirtual |
◆ ToggleCallback()
| void gazebo::GazeboSensorPluginPerchCam::ToggleCallback |
( |
| ) |
|
|
inlineprotected |
The documentation for this class was generated from the following file:
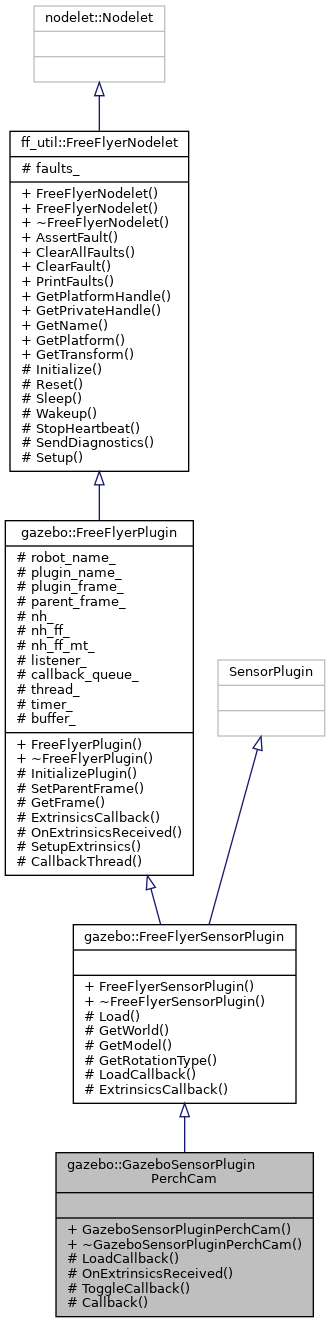
 Public Member Functions inherited from gazebo::FreeFlyerSensorPlugin
Public Member Functions inherited from gazebo::FreeFlyerSensorPlugin