|
NASA Astrobee Robot Software
0.19.1
Flight software for the Astrobee robots operating inside the International Space Station.
|
|
NASA Astrobee Robot Software
0.19.1
Flight software for the Astrobee robots operating inside the International Space Station.
|
#include <traj_opt_pro/polynomial_basis.h>#include <traj_opt_pro/trajectory_solver.h>#include <memory>#include <vector>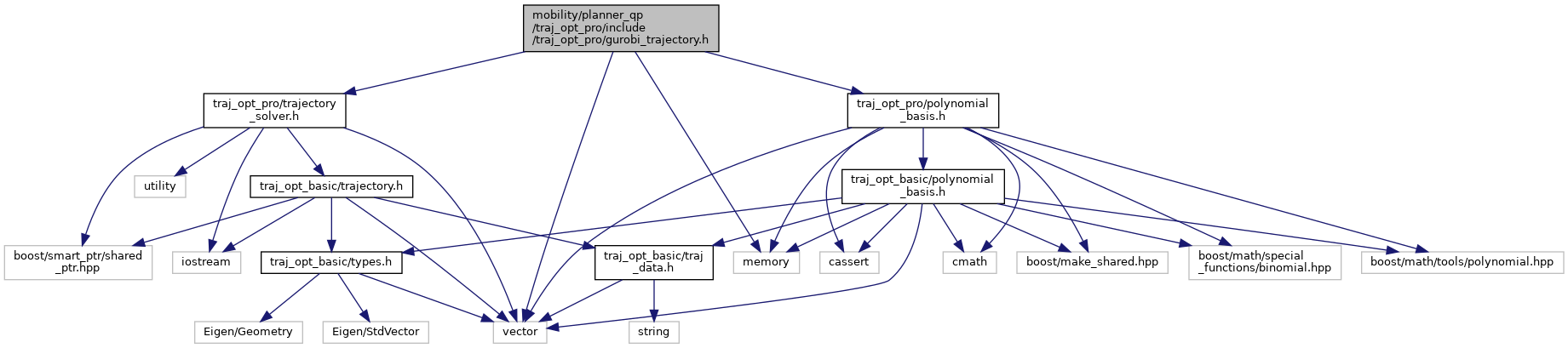
Go to the source code of this file.
Classes | |
| class | traj_opt::TrajSection1D |
| class | traj_opt::TrajSection4D |
| class | traj_opt::LegendreTrajectory |
Namespaces | |
| traj_opt | |
Enumerations | |
| enum | { traj_opt::TRAJ_X = 0, traj_opt::TRAJ_Y = 1, traj_opt::TRAJ_Z = 2, traj_opt::TRAJ_PSI = 3 } |
| enum | traj_opt::ConstraintMode { traj_opt::CONTROL, traj_opt::SAMPLE, traj_opt::CHEBY, traj_opt::ELLIPSE } |