#include <robust_smart_projection_pose_factor.h>
|
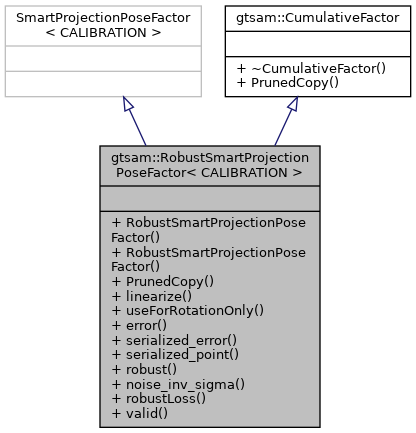
| | RobustSmartProjectionPoseFactor () |
| |
| | RobustSmartProjectionPoseFactor (const SharedNoiseModel &sharedNoiseModel, const boost::shared_ptr< CALIBRATION > K, const boost::optional< Pose3 > body_P_sensor, const SmartProjectionParams ¶ms=SmartProjectionParams(), const bool rotation_only_fallback=false, const bool robust=true, const double huber_k=1.0) |
| |
| boost::shared_ptr< NonlinearFactor > | PrunedCopy (const std::unordered_set< gtsam::Key > &keys_to_remove) const final |
| |
| boost::shared_ptr< GaussianFactor > | linearize (const Values &values) const override |
| |
| bool | useForRotationOnly (const gtsam::TriangulationResult &result) const |
| |
| double | error (const Values &values) const override |
| |
| double | serialized_error (const Values &values) const |
| |
| TriangulationResult | serialized_point (const Values &values) const |
| |
| bool | robust () const |
| |
| double | noise_inv_sigma () const |
| |
| double | robustLoss (const double mahal_distance) const |
| |
| bool | valid (const Values &values) const |
| |
| virtual | ~CumulativeFactor ()=default |
| |
◆ RobustSmartProjectionPoseFactor() [1/2]
template<class CALIBRATION >
◆ RobustSmartProjectionPoseFactor() [2/2]
template<class CALIBRATION >
| gtsam::RobustSmartProjectionPoseFactor< CALIBRATION >::RobustSmartProjectionPoseFactor |
( |
const SharedNoiseModel & |
sharedNoiseModel, |
|
|
const boost::shared_ptr< CALIBRATION > |
K, |
|
|
const boost::optional< Pose3 > |
body_P_sensor, |
|
|
const SmartProjectionParams & |
params = SmartProjectionParams(), |
|
|
const bool |
rotation_only_fallback = false, |
|
|
const bool |
robust = true, |
|
|
const double |
huber_k = 1.0 |
|
) |
| |
|
inline |
Constructor
- Parameters
-
| sharedNoiseModel | isotropic noise model for the 2D feature measurements |
| K | (fixed) calibration, assumed to be the same for all cameras |
| params | parameters for the smart projection factors |
◆ error()
template<class CALIBRATION >
◆ linearize()
template<class CALIBRATION >
◆ noise_inv_sigma()
template<class CALIBRATION >
◆ PrunedCopy()
template<class CALIBRATION >
◆ robust()
template<class CALIBRATION >
◆ robustLoss()
template<class CALIBRATION >
◆ serialized_error()
template<class CALIBRATION >
◆ serialized_point()
template<class CALIBRATION >
◆ useForRotationOnly()
template<class CALIBRATION >
◆ valid()
template<class CALIBRATION >
◆ boost::serialization::access
template<class CALIBRATION >
| friend class boost::serialization::access |
|
friend |
The documentation for this class was generated from the following file:
 Public Member Functions inherited from gtsam::CumulativeFactor
Public Member Functions inherited from gtsam::CumulativeFactor