#include <vo_smart_projection_factor_adder_params.h>
◆ body_T_cam
| gtsam::Pose3 factor_adders::VoSmartProjectionFactorAdderParams::body_T_cam |
◆ cam_intrinsics
| boost::shared_ptr<gtsam::Cal3_S2> factor_adders::VoSmartProjectionFactorAdderParams::cam_intrinsics |
◆ cam_noise
| gtsam::SharedIsotropic factor_adders::VoSmartProjectionFactorAdderParams::cam_noise |
◆ fix_invalid_factors
| bool factor_adders::VoSmartProjectionFactorAdderParams::fix_invalid_factors |
◆ max_num_factors
| int factor_adders::VoSmartProjectionFactorAdderParams::max_num_factors |
◆ max_num_points_per_factor
| int factor_adders::VoSmartProjectionFactorAdderParams::max_num_points_per_factor |
◆ min_avg_distance_from_mean
| double factor_adders::VoSmartProjectionFactorAdderParams::min_avg_distance_from_mean |
◆ min_num_points_per_factor
| int factor_adders::VoSmartProjectionFactorAdderParams::min_num_points_per_factor |
◆ noise_scale
| double factor_adders::VoSmartProjectionFactorAdderParams::noise_scale |
◆ robust
| bool factor_adders::VoSmartProjectionFactorAdderParams::robust |
◆ rotation_only_fallback
| bool factor_adders::VoSmartProjectionFactorAdderParams::rotation_only_fallback |
◆ scale_noise_with_num_points
| bool factor_adders::VoSmartProjectionFactorAdderParams::scale_noise_with_num_points |
◆ smart_factor
| gtsam::SmartProjectionParams factor_adders::VoSmartProjectionFactorAdderParams::smart_factor |
◆ spaced_feature_tracker
The documentation for this struct was generated from the following file:
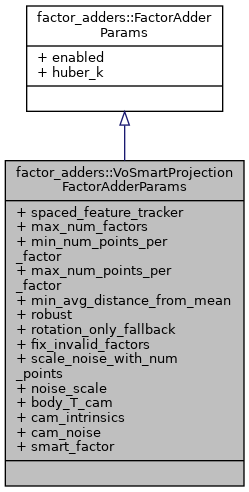
 Public Attributes inherited from factor_adders::FactorAdderParams
Public Attributes inherited from factor_adders::FactorAdderParams