|
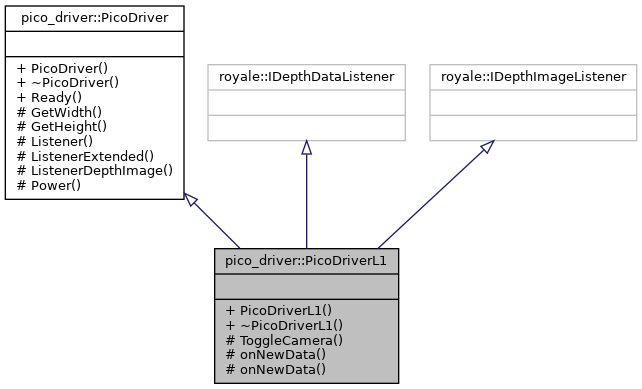
| | PicoDriverL1 (royale::CameraManager &manager, std::string const &uuid, std::string const &use_case, uint32_t exposure, ros::NodeHandle *nh, std::string const &robot, std::string const &name, std::string const &topic) |
| |
| | ~PicoDriverL1 () |
| |
| | PicoDriver (royale::CameraManager &manager, std::string const &uuid, std::string const &use_case, uint32_t exposure) |
| |
| virtual | ~PicoDriver () |
| |
| bool | Ready () |
| |
◆ PicoDriverL1()
| pico_driver::PicoDriverL1::PicoDriverL1 |
( |
royale::CameraManager & |
manager, |
|
|
std::string const & |
uuid, |
|
|
std::string const & |
use_case, |
|
|
uint32_t |
exposure, |
|
|
ros::NodeHandle * |
nh, |
|
|
std::string const & |
robot, |
|
|
std::string const & |
name, |
|
|
std::string const & |
topic |
|
) |
| |
|
inline |
◆ ~PicoDriverL1()
| pico_driver::PicoDriverL1::~PicoDriverL1 |
( |
| ) |
|
|
inline |
◆ onNewData() [1/2]
| void pico_driver::PicoDriverL1::onNewData |
( |
const royale::DepthData * |
data | ) |
|
|
inlineprotected |
◆ onNewData() [2/2]
| void pico_driver::PicoDriverL1::onNewData |
( |
const royale::DepthImage * |
data | ) |
|
|
inlineprotected |
◆ ToggleCamera()
| void pico_driver::PicoDriverL1::ToggleCamera |
( |
| ) |
|
|
inlineprotected |
The documentation for this class was generated from the following file:
 Public Member Functions inherited from pico_driver::PicoDriver
Public Member Functions inherited from pico_driver::PicoDriver