|
NASA Astrobee Robot Software
0.19.1
Flight software for the Astrobee robots operating inside the International Space Station.
|
|
NASA Astrobee Robot Software
0.19.1
Flight software for the Astrobee robots operating inside the International Space Station.
|
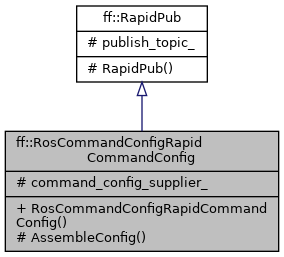
publish a single CommandConfig message More...
#include <ros_command_config_rapid_command_config.h>
Public Member Functions | |
| RosCommandConfigRapidCommandConfig (const std::string &pub_topic, const ros::NodeHandle &nh, config_reader::ConfigReader &config_params) | |
Protected Member Functions | |
| bool | AssembleConfig (rapid::CommandConfig &config, config_reader::ConfigReader &config_params) |
 Protected Member Functions inherited from ff::RapidPub Protected Member Functions inherited from ff::RapidPub | |
| RapidPub (const std::string &pub_topic) | |
Protected Attributes | |
| kn::DdsTypedSupplier< rapid::CommandConfig > | command_config_supplier_ |
| Protected Attributes inherited from ff::RapidPub | |
| std::string | publish_topic_ |
publish a single CommandConfig message
publish a single CommandConfig message, populated with available commands from params in a launch file. This class must be kept in scope, to ensure config message remains reliable durable
|
explicit |
|
protected |
Set command config from ros params in launch file this is fairly ugly and easily allows format errors
| config | config from DdsSupplier |
|
protected |