|
NASA Astrobee Robot Software
0.19.1
Flight software for the Astrobee robots operating inside the International Space Station.
|
|
NASA Astrobee Robot Software
0.19.1
Flight software for the Astrobee robots operating inside the International Space Station.
|
Public Member Functions | |
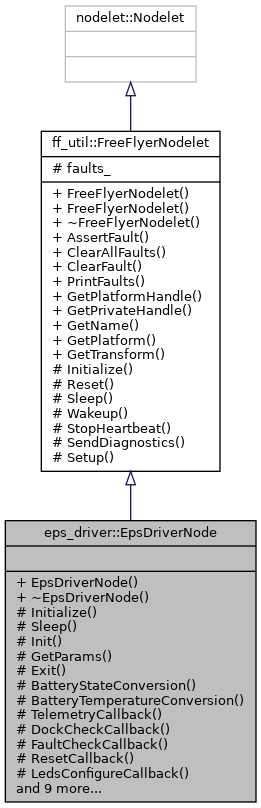
| EpsDriverNode () | |
| ~EpsDriverNode () | |
 Public Member Functions inherited from ff_util::FreeFlyerNodelet Public Member Functions inherited from ff_util::FreeFlyerNodelet | |
| FreeFlyerNodelet (bool autostart_hb_timer=true) | |
| FreeFlyerNodelet (std::string const &name, bool autostart_hb_timer=true) | |
| virtual | ~FreeFlyerNodelet () |
| void | AssertFault (FaultKeys enum_key, std::string const &message, ros::Time time_fault_occurred=ros::Time::now()) |
| void | ClearAllFaults () |
| void | ClearFault (FaultKeys enum_key) |
| void | PrintFaults () |
| ros::NodeHandle * | GetPlatformHandle (bool multithreaded=false) |
| ros::NodeHandle * | GetPrivateHandle (bool multithreaded=false) |
| std::string | GetName () |
| std::string | GetPlatform () |
| std::string | GetTransform (std::string const &child) |
Protected Member Functions | |
| void | Initialize (ros::NodeHandle *nh) |
| void | Sleep (uint32_t microseconds) |
| bool | Init (void) |
| bool | GetParams () |
| void | Exit (int status) |
| sensor_msgs::BatteryState | BatteryStateConversion (EPS::BatteryInfo const &info, std_msgs::Header const &header) |
| sensor_msgs::Temperature | BatteryTemperatureConversion (EPS::BatteryInfo const &info, std_msgs::Header const &header) |
| void | TelemetryCallback (const ros::TimerEvent &) |
| void | DockCheckCallback (const ros::TimerEvent &) |
| void | FaultCheckCallback (const ros::TimerEvent &) |
| bool | ResetCallback (ff_hw_msgs::Reset::Request &req, ff_hw_msgs::Reset::Response &res) |
| bool | LedsConfigureCallback (ff_hw_msgs::ConfigureSystemLeds::Request &req, ff_hw_msgs::ConfigureSystemLeds::Response &res) |
| bool | PayloadConfigureCallback (ff_hw_msgs::ConfigurePayloadPower::Request &req, ff_hw_msgs::ConfigurePayloadPower::Response &res) |
| bool | AdvancedConfigureCallback (ff_hw_msgs::ConfigureAdvancedPower::Request &req, ff_hw_msgs::ConfigureAdvancedPower::Response &res) |
| bool | RingBuzzerCallback (ff_hw_msgs::RingBuzzer::Request &req, ff_hw_msgs::RingBuzzer::Response &res) |
| bool | EnablePmcsCallback (ff_hw_msgs::SetEnabled::Request &req, ff_hw_msgs::SetEnabled::Response &res) |
| bool | GetBatteryStatusCallback (ff_hw_msgs::GetBatteryStatus::Request &req, ff_hw_msgs::GetBatteryStatus::Response &res) |
| bool | GetTemperaturesCallback (ff_hw_msgs::GetTemperatures::Request &req, ff_hw_msgs::GetTemperatures::Response &res) |
| bool | UndockCallback (ff_hw_msgs::Undock::Request &req, ff_hw_msgs::Undock::Response &res) |
| bool | GetBoardInfoCallback (ff_hw_msgs::GetBoardInfo::Request &req, ff_hw_msgs::GetBoardInfo::Response &res) |
| bool | ClearTerminateCallback (ff_hw_msgs::ClearTerminate::Request &req, ff_hw_msgs::ClearTerminate::Response &res) |
| Protected Member Functions inherited from ff_util::FreeFlyerNodelet | |
| virtual void | Reset () |
| virtual void | Sleep () |
| virtual void | Wakeup () |
| void | StopHeartbeat () |
| void | SendDiagnostics (const std::vector< diagnostic_msgs::KeyValue > &keyval) |
| void | Setup (ros::NodeHandle &nh, ros::NodeHandle &nh_mt, std::string plugin_name) |
Additional Inherited Members | |
| Public Types inherited from ff_util::FreeFlyerNodelet | |
| enum | ResolveType : uint8_t { NAMESPACE = 0, TRANSFORM = 1, RESOURCE = 1 } |
| Protected Attributes inherited from ff_util::FreeFlyerNodelet | |
| std::map< std::string, int > | faults_ |
|
inline |
|
inline |
|
inlineprotected |
|
inlineprotected |
|
inlineprotected |
|
inlineprotected |
|
inlineprotected |
|
inlineprotected |
|
inlineprotected |
|
inlineprotected |
|
inlineprotected |
|
inlineprotected |
|
inlineprotected |
|
inlineprotected |
|
inlineprotected |
|
inlineprotectedvirtual |
Reimplemented from ff_util::FreeFlyerNodelet.
|
inlineprotected |
|
inlineprotected |
|
inlineprotected |
|
inlineprotected |
|
inlineprotected |
|
inlineprotected |
|
inlineprotected |