|
NASA Astrobee Robot Software
0.19.1
Flight software for the Astrobee robots operating inside the International Space Station.
|
|
NASA Astrobee Robot Software
0.19.1
Flight software for the Astrobee robots operating inside the International Space Station.
|
#include <google/protobuf/io/zero_copy_stream_impl.h>#include <vector>#include <string>#include <map>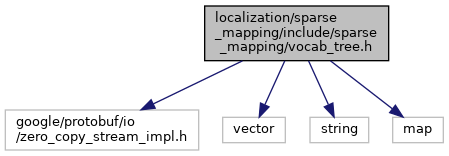

Go to the source code of this file.
Classes | |
| struct | sparse_mapping::VocabDB |
Namespaces | |
| cv | |
| sparse_mapping | |
Functions | |
| void | sparse_mapping::DBSanityChecks (std::string const &db_type, std::string const &descriptor) |
| void | sparse_mapping::BuildDB (std::string const &map_file, std::string const &descriptor, int depth, int branching_factor, int restarts) |
| void | sparse_mapping::ResetDB (VocabDB *db) |
| void | sparse_mapping::QueryDB (std::string const &descriptor, VocabDB *vocab_db, int num_similar, cv::Mat const &descriptors, std::vector< int > *indices, std::vector< double > *scores) |
| void | sparse_mapping::BuildDBforDBoW2 (sparse_mapping::SparseMap *map, std::string const &descriptor, int depth, int branching_factor, int restarts) |