|
NASA Astrobee Robot Software
0.19.1
Flight software for the Astrobee robots operating inside the International Space Station.
|
|
NASA Astrobee Robot Software
0.19.1
Flight software for the Astrobee robots operating inside the International Space Station.
|
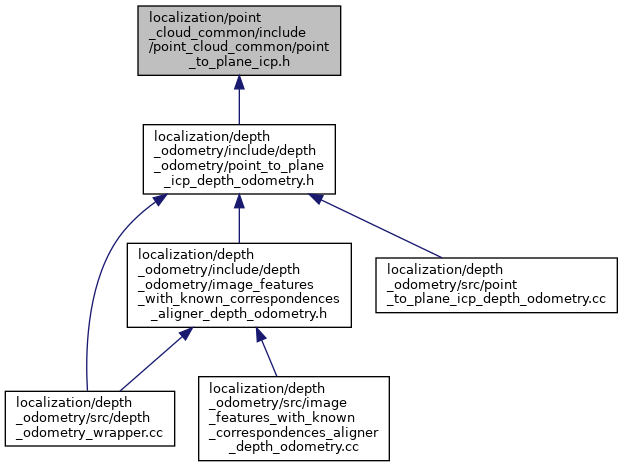
#include <localization_common/logger.h>#include <localization_common/pose_with_covariance.h>#include <localization_common/time.h>#include <localization_common/utilities.h>#include <point_cloud_common/icp_correspondences.h>#include <point_cloud_common/point_to_plane_icp_params.h>#include <point_cloud_common/utilities.h>#include <boost/optional.hpp>#include <point_cloud_common/correspondence_rejection_surface_normal2.h>#include <point_cloud_common/transformation_estimation_symmetric_point_to_plane_lls.h>#include <pcl/point_cloud.h>#include <pcl/point_types.h>#include <pcl/registration/correspondence_rejection_median_distance.h>#include <pcl/registration/icp.h>#include <vector>
Go to the source code of this file.
Classes | |
| class | point_cloud_common::PointToPlaneICP< PointType > |
Namespaces | |
| point_cloud_common | |