|
NASA Astrobee Robot Software
0.19.1
Flight software for the Astrobee robots operating inside the International Space Station.
|
|
NASA Astrobee Robot Software
0.19.1
Flight software for the Astrobee robots operating inside the International Space Station.
|
#include <depth_odometry/pose_with_covariance_and_correspondences.h>#include <ff_msgs/DepthCorrespondence.h>#include <ff_msgs/DepthOdometry.h>#include <ff_msgs/Odometry.h>#include <localization_common/pose_with_covariance.h>#include <localization_common/time.h>#include <localization_measurements/depth_correspondences.h>#include <vector>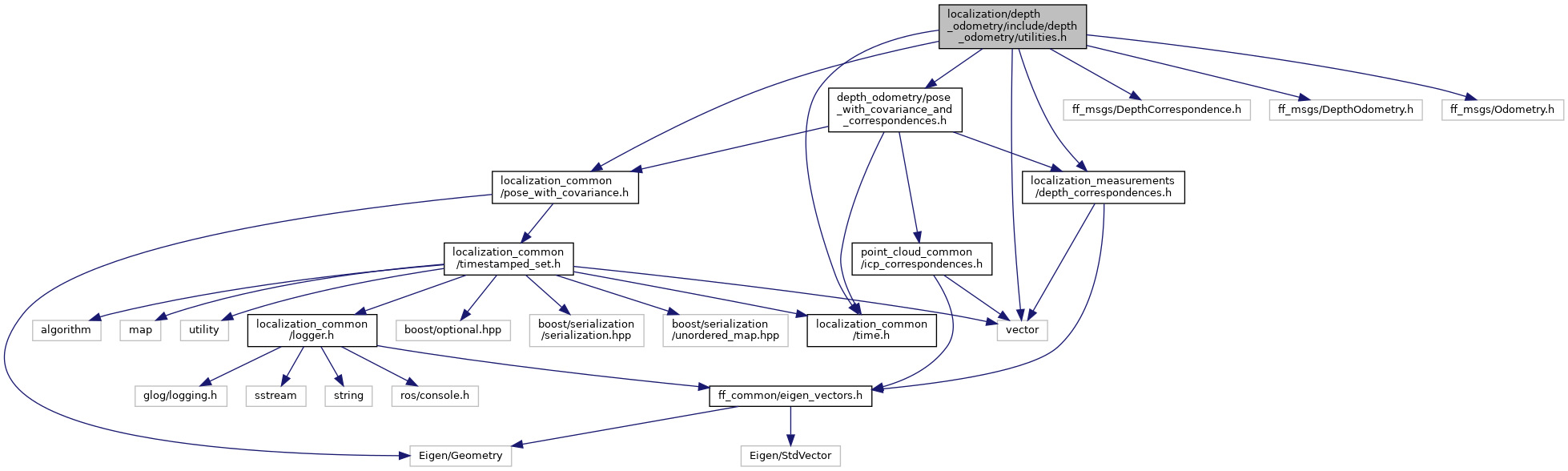
Go to the source code of this file.
Namespaces | |
| depth_odometry | |
Functions | |
| ff_msgs::DepthOdometry | depth_odometry::DepthOdometryMsg (const PoseWithCovarianceAndCorrespondences &sensor_F_source_T_target, const localization_common::PoseWithCovariance &body_F_source_T_target, const double runtime) |
| ff_msgs::Odometry | depth_odometry::OdometryMsg (const localization_common::PoseWithCovariance &sensor_F_source_T_target, const localization_common::PoseWithCovariance &body_F_source_T_target) |
| std::vector< ff_msgs::DepthCorrespondence > | depth_odometry::CorrespondencesMsg (const localization_measurements::DepthCorrespondences &depth_correspondences) |