|
NASA Astrobee Robot Software
0.19.1
Flight software for the Astrobee robots operating inside the International Space Station.
|
|
NASA Astrobee Robot Software
0.19.1
Flight software for the Astrobee robots operating inside the International Space Station.
|
#include <rapid_command_ros_command_plan.h>
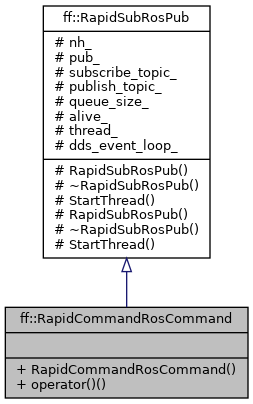
Public Member Functions | |
| RapidCommandRosCommand (const std::string &subscribe_topic, const std::string &pub_topic, const ros::NodeHandle &nh, const unsigned int queue_size=10) | |
| void | operator() (rapid::Command const *cmd) |
Additional Inherited Members | |
 Protected Member Functions inherited from ff::RapidSubRosPub Protected Member Functions inherited from ff::RapidSubRosPub | |
| RapidSubRosPub (const std::string &subscribe_topic, const std::string &pub_topic, const ros::NodeHandle &nh, const std::string &entity_name, const unsigned int queue_size) | |
| ~RapidSubRosPub () | |
| virtual void | StartThread () |
| RapidSubRosPub (const std::string &subscribe_topic, const std::string &pub_topic, const ros::NodeHandle &nh, const std::string &entity_name, const unsigned int queue_size) | |
| ~RapidSubRosPub () | |
| virtual void | StartThread () |
| Protected Attributes inherited from ff::RapidSubRosPub | |
| ros::NodeHandle | nh_ |
| ros::Publisher | pub_ |
| std::string | subscribe_topic_ |
| std::string | publish_topic_ |
| unsigned int | queue_size_ |
| std::atomic< bool > | alive_ |
| std::thread | thread_ |
| kn::DdsEventLoop | dds_event_loop_ |
| ff::RapidCommandRosCommand::RapidCommandRosCommand | ( | const std::string & | subscribe_topic, |
| const std::string & | pub_topic, | ||
| const ros::NodeHandle & | nh, | ||
| const unsigned int | queue_size = 10 |
||
| ) |
| void ff::RapidCommandRosCommand::operator() | ( | rapid::Command const * | cmd | ) |
call back for ddsEventLoop