|
NASA Astrobee Robot Software
0.19.1
Flight software for the Astrobee robots operating inside the International Space Station.
|
|
NASA Astrobee Robot Software
0.19.1
Flight software for the Astrobee robots operating inside the International Space Station.
|
#include <pose_with_covariance_and_inliers.h>
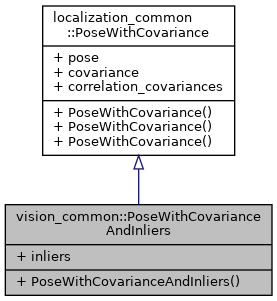
Public Member Functions | |
| PoseWithCovarianceAndInliers (const Eigen::Isometry3d &pose, const localization_common::PoseCovariance &covariance, const std::vector< int > &inliers) | |
 Public Member Functions inherited from localization_common::PoseWithCovariance Public Member Functions inherited from localization_common::PoseWithCovariance | |
| PoseWithCovariance (const Eigen::Isometry3d &pose, const PoseCovariance &covariance) | |
| PoseWithCovariance (const Eigen::Isometry3d &pose, const PoseCovariance &covariance, const TimestampedSet< PoseCovariance > &correlation_covariances) | |
| PoseWithCovariance () | |
Public Attributes | |
| std::vector< int > | inliers |
| Public Attributes inherited from localization_common::PoseWithCovariance | |
| Eigen::Isometry3d | pose |
| PoseCovariance | covariance |
| TimestampedSet< PoseCovariance > | correlation_covariances |
|
inline |
| std::vector<int> vision_common::PoseWithCovarianceAndInliers::inliers |