|
NASA Astrobee Robot Software
0.19.1
Flight software for the Astrobee robots operating inside the International Space Station.
|
|
NASA Astrobee Robot Software
0.19.1
Flight software for the Astrobee robots operating inside the International Space Station.
|
#include <pose_node_adder_params.h>
Public Types | |
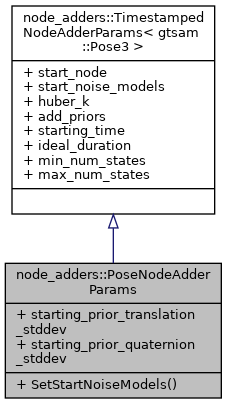
| using | Base = TimestampedNodeAdderParams< gtsam::Pose3 > |
Public Member Functions | |
| void | SetStartNoiseModels () |
Public Attributes | |
| double | starting_prior_translation_stddev |
| double | starting_prior_quaternion_stddev |
 Public Attributes inherited from node_adders::TimestampedNodeAdderParams< gtsam::Pose3 > Public Attributes inherited from node_adders::TimestampedNodeAdderParams< gtsam::Pose3 > | |
| gtsam::Pose3 | start_node |
| std::vector< gtsam::SharedNoiseModel > | start_noise_models |
| double | huber_k |
| bool | add_priors |
| localization_common::Time | starting_time |
| double | ideal_duration |
| int | min_num_states |
| int | max_num_states |
Friends | |
| class | boost::serialization::access |
| using node_adders::PoseNodeAdderParams::Base = TimestampedNodeAdderParams<gtsam::Pose3> |
|
inline |
|
friend |
| double node_adders::PoseNodeAdderParams::starting_prior_quaternion_stddev |
| double node_adders::PoseNodeAdderParams::starting_prior_translation_stddev |