#include <point_to_plane_icp_depth_odometry_params.h>
◆ bins_per_axis
| int depth_odometry::PointToPlaneICPDepthOdometryParams::bins_per_axis |
◆ downsample
| bool depth_odometry::PointToPlaneICPDepthOdometryParams::downsample |
◆ downsample_leaf_size
| double depth_odometry::PointToPlaneICPDepthOdometryParams::downsample_leaf_size |
◆ icp
◆ max_depth_change_factor
| double depth_odometry::PointToPlaneICPDepthOdometryParams::max_depth_change_factor |
◆ normal_estimation_method
| pcl::IntegralImageNormalEstimation<pcl::PointXYZI, pcl::Normal>::NormalEstimationMethod depth_odometry::PointToPlaneICPDepthOdometryParams::normal_estimation_method |
◆ normal_smoothing_size
| double depth_odometry::PointToPlaneICPDepthOdometryParams::normal_smoothing_size |
◆ num_samples
| int depth_odometry::PointToPlaneICPDepthOdometryParams::num_samples |
◆ use_depth_dependent_smoothing
| bool depth_odometry::PointToPlaneICPDepthOdometryParams::use_depth_dependent_smoothing |
◆ use_normal_space_sampling
| bool depth_odometry::PointToPlaneICPDepthOdometryParams::use_normal_space_sampling |
◆ use_organized_normal_estimation
| bool depth_odometry::PointToPlaneICPDepthOdometryParams::use_organized_normal_estimation |
The documentation for this struct was generated from the following file:
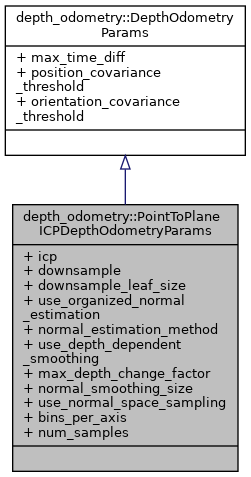
 Public Attributes inherited from depth_odometry::DepthOdometryParams
Public Attributes inherited from depth_odometry::DepthOdometryParams