|
NASA Astrobee Robot Software
0.19.1
Flight software for the Astrobee robots operating inside the International Space Station.
|
|
NASA Astrobee Robot Software
0.19.1
Flight software for the Astrobee robots operating inside the International Space Station.
|
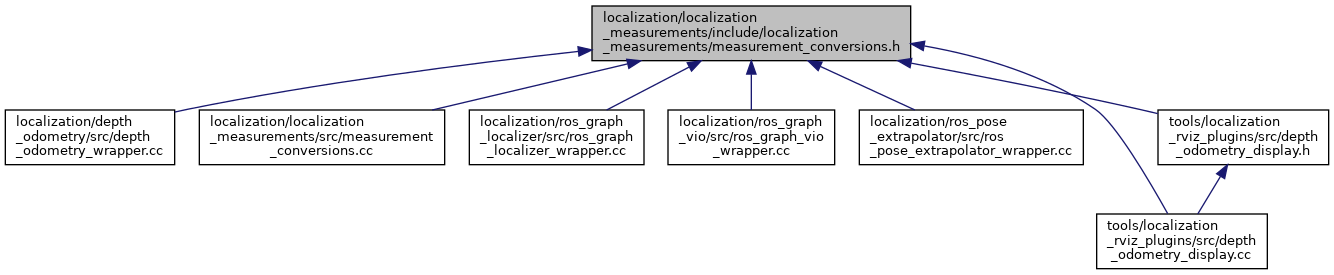
#include <ff_msgs/DepthOdometry.h>#include <ff_msgs/DepthLandmarks.h>#include <ff_msgs/Feature2dArray.h>#include <ff_msgs/VisualLandmarks.h>#include <localization_common/combined_nav_state.h>#include <localization_common/combined_nav_state_covariances.h>#include <localization_common/utilities.h>#include <localization_measurements/depth_image_measurement.h>#include <localization_measurements/depth_odometry_measurement.h>#include <localization_measurements/fan_speed_mode.h>#include <localization_measurements/feature_points_measurement.h>#include <localization_measurements/handrail_points_measurement.h>#include <localization_measurements/image_measurement.h>#include <localization_measurements/imu_measurement.h>#include <localization_measurements/matched_projections_measurement.h>#include <localization_measurements/plane.h>#include <localization_measurements/point_cloud_measurement.h>#include <localization_measurements/timestamped_handrail_pose.h>#include <Eigen/Core>#include <pcl/point_cloud.h>#include <pcl/point_types.h>#include <pcl_conversions/pcl_conversions.h>#include <sensor_msgs/Image.h>#include <sensor_msgs/PointCloud2.h>#include <string>#include <utility>#include <vector>
Go to the source code of this file.
Namespaces | |
| localization_measurements | |
Functions | |
| MatchedProjectionsMeasurement | localization_measurements::MakeMatchedProjectionsMeasurement (const ff_msgs::VisualLandmarks &visual_landmarks) |
| HandrailPointsMeasurement | localization_measurements::MakeHandrailPointsMeasurement (const ff_msgs::DepthLandmarks &depth_landmarks, const TimestampedHandrailPose &world_T_handrail) |
| Plane | localization_measurements::MakeHandrailPlane (const gtsam::Pose3 &world_T_handrail, const double distance_to_wall) |
| std::pair< gtsam::Point3, gtsam::Point3 > | localization_measurements::MakeHandrailEndpoints (const gtsam::Pose3 &world_T_handrail, const double length) |
| MatchedProjectionsMeasurement | localization_measurements::FrameChangeMatchedProjectionsMeasurement (const MatchedProjectionsMeasurement &matched_projections_measurement, const gtsam::Pose3 &new_frame_T_measurement_origin) |
| FeaturePointsMeasurement | localization_measurements::MakeFeaturePointsMeasurement (const ff_msgs::Feature2dArray &optical_flow_tracks) |
| FanSpeedMode | localization_measurements::ConvertFanSpeedMode (const uint8_t speed) |
| boost::optional< ImageMeasurement > | localization_measurements::MakeImageMeasurement (const sensor_msgs::ImageConstPtr &image_msg, const std::string &encoding) |
| PointCloudMeasurement | localization_measurements::MakePointCloudMeasurement (const sensor_msgs::PointCloud2ConstPtr &point_cloud_msg) |
| boost::optional< DepthImageMeasurement > | localization_measurements::MakeDepthImageMeasurement (const sensor_msgs::PointCloud2ConstPtr &depth_cloud_msg, const sensor_msgs::ImageConstPtr &image_msg, const Eigen::Affine3d image_A_depth_cam=Eigen::Affine3d::Identity()) |
| template<typename PointType > | |
| sensor_msgs::PointCloud2 | localization_measurements::MakePointCloudMsg (const pcl::PointCloud< PointType > &cloud, const localization_common::Time timestamp, const std::string frame) |
| localization_common::PoseWithCovariance | localization_measurements::MakePoseWithCovariance (const geometry_msgs::PoseWithCovariance &msg) |
| Odometry | localization_measurements::MakeOdometry (const ff_msgs::Odometry &msg) |
| DepthCorrespondences | localization_measurements::MakeDepthCorrespondences (const std::vector< ff_msgs::DepthCorrespondence > &msgs) |
| DepthOdometryMeasurement | localization_measurements::MakeDepthOdometryMeasurement (const ff_msgs::DepthOdometry &depth_odometry_msg) |