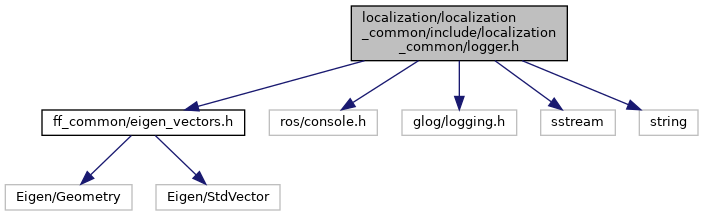
#include <ff_common/eigen_vectors.h>
#include <ros/console.h>
#include <glog/logging.h>
#include <sstream>
#include <string>
Go to the source code of this file.
◆ __FILENAME__
| #define __FILENAME__ (strrchr(__FILE__, '/') ? strrchr(__FILE__, '/') + 1 : __FILE__) |
◆ LogDebug
Value: do { \
std::stringstream ss; \
ss <<
__FILENAME__ <<
":" << __LINE__ <<
": " << msg << std::endl; \
ROS_DEBUG_STREAM(ss.str()); \
} while (0)
◆ LogDebugEveryN
| #define LogDebugEveryN |
( |
|
n, |
|
|
|
msg |
|
) |
| |
Value: do { \
static int count = 0; \
++count; \
if (count % n == 0) { \
std::stringstream ss; \
ss <<
__FILENAME__ <<
":" << __LINE__ <<
": " << msg << std::endl; \
ROS_DEBUG_STREAM(ss.str()); \
} \
} while (0)
◆ LogError
Value: do { \
std::stringstream ss; \
ss <<
__FILENAME__ <<
":" << __LINE__ <<
": " << msg << std::endl; \
ROS_ERROR_STREAM(ss.str()); \
} while (0)
◆ LogErrorEveryN
| #define LogErrorEveryN |
( |
|
n, |
|
|
|
msg |
|
) |
| |
Value: do { \
static int count = 0; \
++count; \
if (count % n == 0) { \
std::stringstream ss; \
ss <<
__FILENAME__ <<
":" << __LINE__ <<
": " << msg << std::endl; \
ROS_ERROR_STREAM(ss.str()); \
} \
} while (0)
◆ LogFatal
Value: do { \
std::stringstream ss; \
ss <<
__FILENAME__ <<
":" << __LINE__ <<
": " << msg << std::endl; \
ROS_FATAL_STREAM(ss.str()); \
} while (0)
◆ LogInfo
Value: do { \
std::stringstream ss; \
ss <<
__FILENAME__ <<
":" << __LINE__ <<
": " << msg << std::endl; \
ROS_INFO_STREAM(ss.str()); \
} while (0)
◆ LogInfoEveryN
| #define LogInfoEveryN |
( |
|
n, |
|
|
|
msg |
|
) |
| |
Value: do { \
static int count = 0; \
++count; \
if (count % n == 0) { \
std::stringstream ss; \
ss <<
__FILENAME__ <<
":" << __LINE__ <<
": " << msg << std::endl; \
ROS_INFO_STREAM(ss.str()); \
} \
} while (0)
◆ LogWarning
| #define LogWarning |
( |
|
msg | ) |
|
Value: do { \
std::stringstream ss; \
ss <<
__FILENAME__ <<
":" << __LINE__ <<
": " << msg << std::endl; \
ROS_WARN_STREAM(ss.str()); \
} while (0)
◆ LogWarningEveryN
| #define LogWarningEveryN |
( |
|
n, |
|
|
|
msg |
|
) |
| |
Value: do { \
static int count = 0; \
++count; \
if (count % n == 0) { \
std::stringstream ss; \
ss <<
__FILENAME__ <<
":" << __LINE__ <<
": " << msg << std::endl; \
ROS_WARN_STREAM(ss.str()); \
} \
} while (0)
◆ USE_ROS_LOGGING