#include <timestamped_node_adder_model.h>
|
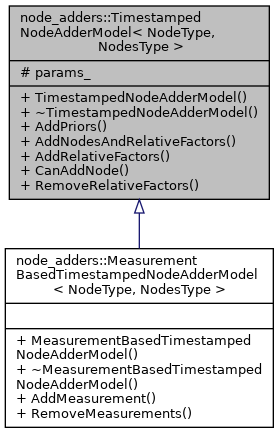
| | TimestampedNodeAdderModel (const TimestampedNodeAdderModelParams ¶ms) |
| |
| virtual | ~TimestampedNodeAdderModel ()=default |
| |
| virtual void | AddPriors (const NodeType &node, const std::vector< gtsam::SharedNoiseModel > &noise_models, const localization_common::Time timestamp, const NodesType &nodes, gtsam::NonlinearFactorGraph &factors) const =0 |
| |
| virtual bool | AddNodesAndRelativeFactors (const localization_common::Time timestamp_a, const localization_common::Time timestamp_b, NodesType &nodes, gtsam::NonlinearFactorGraph &factors) const =0 |
| |
| virtual bool | AddRelativeFactors (const localization_common::Time timestamp_a, const localization_common::Time timestamp_b, const NodesType &nodes, gtsam::NonlinearFactorGraph &factors) const =0 |
| |
| virtual bool | CanAddNode (const localization_common::Time timestamp) const =0 |
| |
| virtual bool | RemoveRelativeFactors (const localization_common::Time timestamp_a, const localization_common::Time timestamp_b, const NodesType &nodes, gtsam::NonlinearFactorGraph &factors) const =0 |
| |
◆ TimestampedNodeAdderModel()
template<typename NodeType , typename NodesType >
◆ ~TimestampedNodeAdderModel()
template<typename NodeType , typename NodesType >
◆ AddNodesAndRelativeFactors()
template<typename NodeType , typename NodesType >
◆ AddPriors()
template<typename NodeType , typename NodesType >
◆ AddRelativeFactors()
template<typename NodeType , typename NodesType >
◆ CanAddNode()
template<typename NodeType , typename NodesType >
◆ RemoveRelativeFactors()
template<typename NodeType , typename NodesType >
◆ params_
template<typename NodeType , typename NodesType >
The documentation for this class was generated from the following file: