|
NASA Astrobee Robot Software
0.19.1
Flight software for the Astrobee robots operating inside the International Space Station.
|
|
NASA Astrobee Robot Software
0.19.1
Flight software for the Astrobee robots operating inside the International Space Station.
|
#include <graph_vio_simulator.h>
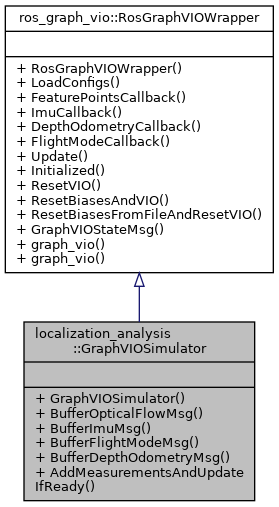
Public Member Functions | |
| GraphVIOSimulator (const GraphVIOSimulatorParams ¶ms, const std::string &graph_config_path_prefix) | |
| void | BufferOpticalFlowMsg (const ff_msgs::Feature2dArray &feature_array_msg) |
| void | BufferImuMsg (const sensor_msgs::Imu &imu_msg) |
| void | BufferFlightModeMsg (const ff_msgs::FlightMode &flight_mode_msg) |
| void | BufferDepthOdometryMsg (const ff_msgs::DepthOdometry &depth_odometry_msg) |
| bool | AddMeasurementsAndUpdateIfReady (const localization_common::Time ¤t_time) |
 Public Member Functions inherited from ros_graph_vio::RosGraphVIOWrapper Public Member Functions inherited from ros_graph_vio::RosGraphVIOWrapper | |
| RosGraphVIOWrapper (const std::string &graph_config_path_prefix="") | |
| void | LoadConfigs (const std::string &graph_config_path_prefix) |
| void | FeaturePointsCallback (const ff_msgs::Feature2dArray &feature_array_msg) |
| void | ImuCallback (const sensor_msgs::Imu &imu_msg) |
| void | DepthOdometryCallback (const ff_msgs::DepthOdometry &depth_odometry_msg) |
| void | FlightModeCallback (const ff_msgs::FlightMode &flight_mode) |
| void | Update () |
| bool | Initialized () const |
| void | ResetVIO () |
| void | ResetBiasesAndVIO () |
| void | ResetBiasesFromFileAndResetVIO () |
| boost::optional< ff_msgs::GraphVIOState > | GraphVIOStateMsg () |
| const std::unique_ptr< graph_vio::GraphVIO > & | graph_vio () const |
| std::unique_ptr< graph_vio::GraphVIO > & | graph_vio () |
| localization_analysis::GraphVIOSimulator::GraphVIOSimulator | ( | const GraphVIOSimulatorParams & | params, |
| const std::string & | graph_config_path_prefix | ||
| ) |
| bool localization_analysis::GraphVIOSimulator::AddMeasurementsAndUpdateIfReady | ( | const localization_common::Time & | current_time | ) |
| void localization_analysis::GraphVIOSimulator::BufferDepthOdometryMsg | ( | const ff_msgs::DepthOdometry & | depth_odometry_msg | ) |
| void localization_analysis::GraphVIOSimulator::BufferFlightModeMsg | ( | const ff_msgs::FlightMode & | flight_mode_msg | ) |
| void localization_analysis::GraphVIOSimulator::BufferImuMsg | ( | const sensor_msgs::Imu & | imu_msg | ) |
| void localization_analysis::GraphVIOSimulator::BufferOpticalFlowMsg | ( | const ff_msgs::Feature2dArray & | feature_array_msg | ) |