#include <ros_arm_joint_sample.h>
|
| | RosArmJointSampleToRapid (const std::string &subscribe_topic, const std::string &pub_topic, const ros::NodeHandle &nh, unsigned int queue_size=10) |
| |
| void | Callback (ff_msgs::JointSampleStampedConstPtr const &sample) |
| |
|
| | RosSubRapidPub (const std::string &subscribe_topic, const std::string &pub_topic, const ros::NodeHandle &nh, const unsigned int queue_size) |
| |
| | RosSubRapidPub (const std::string &subscribe_topic, const std::string &pub_topic, const ros::NodeHandle &nh, const unsigned int queue_size) |
| |
◆ ConfigSupplier
◆ ConfigSupplierPtr
◆ SampleSupplier
◆ SampleSupplierPtr
◆ RosArmJointSampleToRapid()
| ff::RosArmJointSampleToRapid::RosArmJointSampleToRapid |
( |
const std::string & |
subscribe_topic, |
|
|
const std::string & |
pub_topic, |
|
|
const ros::NodeHandle & |
nh, |
|
|
unsigned int |
queue_size = 10 |
|
) |
| |
◆ Callback()
| void ff::RosArmJointSampleToRapid::Callback |
( |
ff_msgs::JointSampleStampedConstPtr const & |
sample | ) |
|
◆ config_supplier_
◆ sample_supplier_
The documentation for this class was generated from the following files:
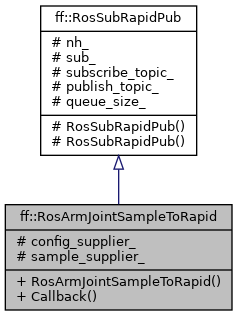
 Protected Attributes inherited from ff::RosSubRapidPub
Protected Attributes inherited from ff::RosSubRapidPub