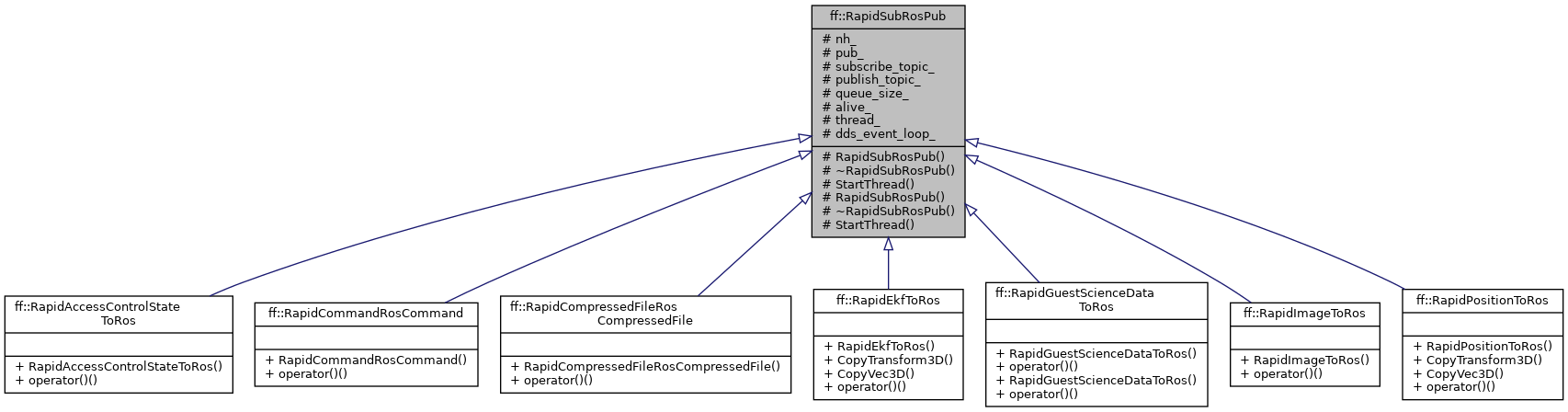
base class for rapid subscriber to ros publisher
More...
#include <rapid_sub_ros_pub.h>
|
| | RapidSubRosPub (const std::string &subscribe_topic, const std::string &pub_topic, const ros::NodeHandle &nh, const std::string &entity_name, const unsigned int queue_size) |
| |
| | ~RapidSubRosPub () |
| |
| virtual void | StartThread () |
| |
| | RapidSubRosPub (const std::string &subscribe_topic, const std::string &pub_topic, const ros::NodeHandle &nh, const std::string &entity_name, const unsigned int queue_size) |
| |
| | ~RapidSubRosPub () |
| |
| virtual void | StartThread () |
| |
base class for rapid subscriber to ros publisher
base class for rapid subscriber to ros publisher. A kn::DdsEventLoop is run within its own thread of execution. Child classes must connect requeseted messege and callback to m_ddsEventLoop and call startThread()
◆ RapidSubRosPub() [1/2]
| ff::RapidSubRosPub::RapidSubRosPub |
( |
const std::string & |
subscribe_topic, |
|
|
const std::string & |
pub_topic, |
|
|
const ros::NodeHandle & |
nh, |
|
|
const std::string & |
entity_name, |
|
|
const unsigned int |
queue_size |
|
) |
| |
|
protected |
◆ ~RapidSubRosPub() [1/2]
| ff::RapidSubRosPub::~RapidSubRosPub |
( |
| ) |
|
|
protected |
◆ RapidSubRosPub() [2/2]
| ff::RapidSubRosPub::RapidSubRosPub |
( |
const std::string & |
subscribe_topic, |
|
|
const std::string & |
pub_topic, |
|
|
const ros::NodeHandle & |
nh, |
|
|
const std::string & |
entity_name, |
|
|
const unsigned int |
queue_size |
|
) |
| |
|
protected |
◆ ~RapidSubRosPub() [2/2]
| ff::RapidSubRosPub::~RapidSubRosPub |
( |
| ) |
|
|
protected |
◆ StartThread() [1/2]
| void ff::RapidSubRosPub::StartThread |
( |
| ) |
|
|
protectedvirtual |
Will start thread execution by calling threadExec()
◆ StartThread() [2/2]
| virtual void ff::RapidSubRosPub::StartThread |
( |
| ) |
|
|
protectedvirtual |
Will start thread execution by calling threadExec()
◆ alive_
| std::atomic< bool > ff::RapidSubRosPub::alive_ |
|
protected |
◆ dds_event_loop_
| kn::DdsEventLoop ff::RapidSubRosPub::dds_event_loop_ |
|
protected |
◆ nh_
| ros::NodeHandle ff::RapidSubRosPub::nh_ |
|
protected |
◆ pub_
| ros::Publisher ff::RapidSubRosPub::pub_ |
|
protected |
◆ publish_topic_
| std::string ff::RapidSubRosPub::publish_topic_ |
|
protected |
◆ queue_size_
| unsigned int ff::RapidSubRosPub::queue_size_ |
|
protected |
◆ subscribe_topic_
| std::string ff::RapidSubRosPub::subscribe_topic_ |
|
protected |
◆ thread_
| std::thread ff::RapidSubRosPub::thread_ |
|
protected |
The documentation for this class was generated from the following files: