|
NASA Astrobee Robot Software
0.19.1
Flight software for the Astrobee robots operating inside the International Space Station.
|
|
NASA Astrobee Robot Software
0.19.1
Flight software for the Astrobee robots operating inside the International Space Station.
|
#include <camera/camera_model.h>#include <ff_common/eigen_vectors.h>#include <Eigen/Geometry>#include <ceres/ceres.h>#include <array>#include <functional>#include <map>#include <set>#include <string>#include <utility>#include <vector>#include <limits>#include <memory>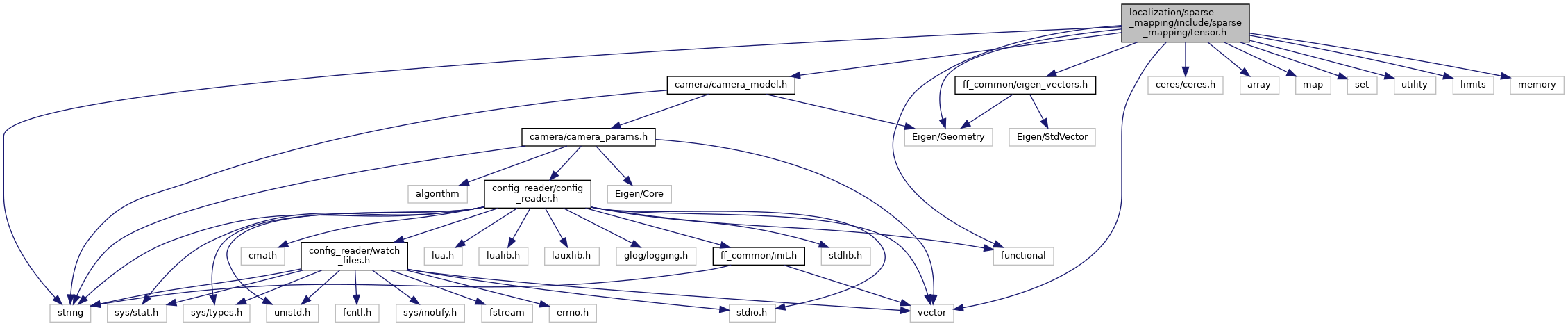

Go to the source code of this file.
Namespaces | |
| std | |
| cv | |
| sparse_mapping | |
Typedefs | |
| typedef std::map< std::pair< int, int >, Eigen::Affine3d, std::less< std::pair< int, int > >, Eigen::aligned_allocator< std::pair< std::pair< int, int > const, Eigen::Affine3d > > > | sparse_mapping::CIDPairAffineMap |
| typedef std::array< std::pair< std::pair< int, int >, Eigen::Affine3d >, 3 > | sparse_mapping::CIDAffineTuple |
| typedef std::vector< CIDAffineTuple, Eigen::aligned_allocator< CIDAffineTuple > > | sparse_mapping::CIDAffineTupleVec |
Functions | |
| void | sparse_mapping::MatchFeatures (const std::string &essential_file, const std::string &matches_file, sparse_mapping::SparseMap *s) |
| void | sparse_mapping::BuildTracks (bool rm_invalid_xyz, const std::string &matches_file, sparse_mapping::SparseMap *s) |
| void | sparse_mapping::IncrementalBA (std::string const &essential_file, sparse_mapping::SparseMap *s) |
| void | sparse_mapping::CloseLoop (sparse_mapping::SparseMap *s) |
| void | sparse_mapping::BundleAdjust (bool fix_all_cameras, sparse_mapping::SparseMap *map, std::set< int > const &fixed_cameras=std::set< int >()) |
| void | sparse_mapping::BundleAdjustment (sparse_mapping::SparseMap *s, ceres::LossFunction *loss, const ceres::Solver::Options &options, ceres::Solver::Summary *summary, int first=0, int last=std::numeric_limits< int >::max(), bool fix_all_cameras=false, std::set< int > const &fixed_cameras=std::set< int >()) |
| void | sparse_mapping::AppendMapFile (std::string const &mapOut, std::string const &mapIn, int num_image_overlaps_at_endpoints, double outlier_factor, bool bundle_adjust, bool fix_first_map) |
| void | sparse_mapping::MergeMaps (sparse_mapping::SparseMap *A_in, sparse_mapping::SparseMap *B_in, int num_image_overlaps_at_endpoints, double outlier_factor, std::string const &output_map, sparse_mapping::SparseMap *C_out) |
| void | sparse_mapping::ExtractSubmap (std::vector< std::string > *keep_ptr, sparse_mapping::SparseMap *map_ptr) |
| double | sparse_mapping::RegistrationOrVerification (std::vector< std::string > const &data_files, bool verification, sparse_mapping::SparseMap *s) |
| void | sparse_mapping::WriteAffineCSV (CIDPairAffineMap const &relative_affines, std::string const &output_filename) |
| void | sparse_mapping::WriteAffineCSV (CIDAffineTupleVec const &relative_affines, std::string const &output_filename) |
| void | sparse_mapping::ReadAffineCSV (std::string const &input_filename, CIDPairAffineMap *relative_affines) |
| void | sparse_mapping::ReadAffineCSV (std::string const &input_filename, CIDAffineTupleVec *relative_affines) |
| void | sparse_mapping::PrintTrackStats (std::vector< std::map< int, int > >const &pid_to_cid_fid, std::string const &step) |
| void | sparse_mapping::FindEssentialAndInliers (Eigen::Matrix2Xd const &keypoints1, Eigen::Matrix2Xd const &keypoints2, std::vector< cv::DMatch > const &matches, camera::CameraParameters const &camera_params, std::vector< cv::DMatch > *inlier_matches, std::vector< size_t > *vec_inliers, Eigen::Matrix3d *essential_matrix, const int ransac_iterations=4096) |
| void | sparse_mapping::BuildMapFindEssentialAndInliers (const Eigen::Matrix2Xd &keypoints1, const Eigen::Matrix2Xd &keypoints2, const std::vector< cv::DMatch > &matches, camera::CameraParameters const &camera_params, bool compute_inliers_only, size_t cam_a_idx, size_t cam_b_idx, std::mutex *match_mutex, CIDPairAffineMap *relative_b_t_a, std::vector< cv::DMatch > *inlier_matches, bool compute_rays_angle, double *rays_angle) |
| void | sparse_mapping::GenerateCIDToPIDFIDMap (std::vector< std::map< int, int > > const &pid_to_cid_fid, size_t num_of_cameras, std::vector< std::map< int, int > > *cid_to_pid_fid) |
| void | sparse_mapping::GenerateTupleListing (CIDPairAffineMap const &relative_affines, std::set< std::tuple< int, int, int > > *tuple_listing) |
| void | sparse_mapping::Triangulate (bool rm_invalid_xyz, double focal_length, std::vector< Eigen::Affine3d > const &cid_to_cam_t_global, std::vector< Eigen::Matrix2Xd > const &cid_to_keypoint_map, std::vector< std::map< int, int > > *pid_to_cid_fid, std::vector< Eigen::Vector3d > *pid_to_xyz, std::vector< std::map< int, int > > *cid_fid_to_pid) |