|
NASA Astrobee Robot Software
0.19.1
Flight software for the Astrobee robots operating inside the International Space Station.
|
|
NASA Astrobee Robot Software
0.19.1
Flight software for the Astrobee robots operating inside the International Space Station.
|
#include <localization_common/pose_with_covariance.h>#include <localization_common/time.h>#include <localization_common/timestamped_set.h>#include <localization_measurements/measurement.h>#include <gtsam/geometry/Pose3.h>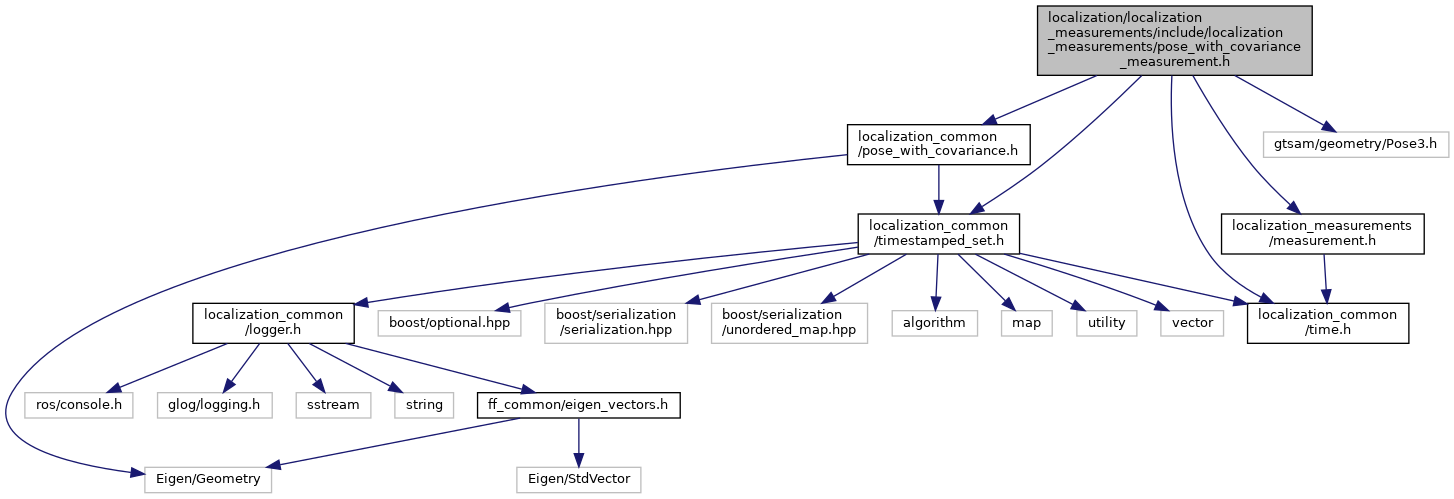
Go to the source code of this file.
Classes | |
| struct | localization_measurements::PoseWithCovarianceMeasurement |
Namespaces | |
| localization_measurements | |
Typedefs | |
| using | localization_measurements::PoseCovariance = Eigen::Matrix< double, 6, 6 > |