|
NASA Astrobee Robot Software
0.19.1
Flight software for the Astrobee robots operating inside the International Space Station.
|
|
NASA Astrobee Robot Software
0.19.1
Flight software for the Astrobee robots operating inside the International Space Station.
|
#include <config_reader/config_reader.h>#include <marker_tracking/marker_detector.h>#include <cstdio>#include <fstream>#include <iostream>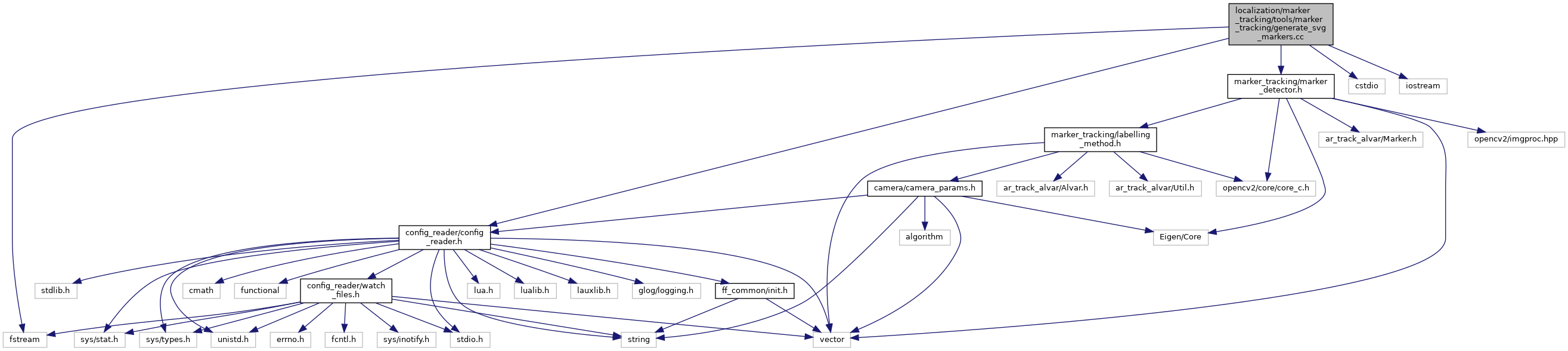
Classes | |
| class | SvgGroup |
| class | DimU |
| class | RectBW |
| class | LineBW |
| class | CenteredText |
Functions | |
| int | MarkerToSvg (std::ofstream &out, const alvar::MarkerData &marker, float pos_x, float pos_y) |
| int | DrillHoleToSvg (std::ofstream &out, float dia, float pos_x, float pos_y) |
| bool | WriteSvgHeader (std::ofstream &out, int width, int height) |
| bool | WriteSvgClosing (std::ofstream &out) |
| int | main (int argc, char *argv[]) |
Variables | |
| const bool | kDebugMarker = false |
| int DrillHoleToSvg | ( | std::ofstream & | out, |
| float | dia, | ||
| float | pos_x, | ||
| float | pos_y | ||
| ) |
| int main | ( | int | argc, |
| char * | argv[] | ||
| ) |
Get optional drawing offset in X and Y. Unfortunately, like the translate command that does not accept units, the SVG viewbox command also does not accept units, hence is not usable for our application. This means that the drawing_[xy]offset are manually applied to all drawing elements!
| int MarkerToSvg | ( | std::ofstream & | out, |
| const alvar::MarkerData & | marker, | ||
| float | pos_x, | ||
| float | pos_y | ||
| ) |
| bool WriteSvgClosing | ( | std::ofstream & | out | ) |
| bool WriteSvgHeader | ( | std::ofstream & | out, |
| int | width, | ||
| int | height | ||
| ) |
| const bool kDebugMarker = false |