#include <point_to_line_segment_factor.h>
|
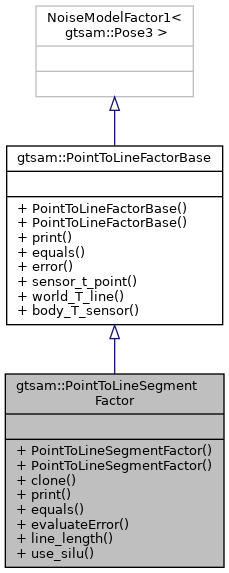
| | PointToLineSegmentFactor () |
| |
| | PointToLineSegmentFactor (const Point3 &sensor_t_point, const Pose3 &world_T_line, const Pose3 &body_T_sensor, const double line_length, const SharedNoiseModel &model, Key pose_key, const bool use_silu=false) |
| |
| gtsam::NonlinearFactor::shared_ptr | clone () const override |
| |
| void | print (const std::string &s="", const KeyFormatter &keyFormatter=DefaultKeyFormatter) const override |
| |
| bool | equals (const NonlinearFactor &p, double tol=1e-9) const override |
| |
| Vector | evaluateError (const Pose3 &world_T_body, boost::optional< Matrix & > H=boost::none) const override |
| |
| double | line_length () const |
| |
| bool | use_silu () const |
| |
| | PointToLineFactorBase () |
| |
| | PointToLineFactorBase (const Point3 &sensor_t_point, const Pose3 &world_T_line, const Pose3 &body_T_sensor, const SharedNoiseModel &model, Key pose_key) |
| |
| void | print (const std::string &s="", const KeyFormatter &keyFormatter=DefaultKeyFormatter) const override |
| |
| bool | equals (const NonlinearFactor &p, double tol=1e-9) const override |
| |
| Vector | error (const Pose3 &world_T_body, boost::optional< Matrix & > H=boost::none) const |
| |
| const Point3 & | sensor_t_point () const |
| |
| const Pose3 & | world_T_line () const |
| |
| const Pose3 & | body_T_sensor () const |
| |
◆ PointToLineSegmentFactor() [1/2]
| gtsam::PointToLineSegmentFactor::PointToLineSegmentFactor |
( |
| ) |
|
|
inline |
◆ PointToLineSegmentFactor() [2/2]
| gtsam::PointToLineSegmentFactor::PointToLineSegmentFactor |
( |
const Point3 & |
sensor_t_point, |
|
|
const Pose3 & |
world_T_line, |
|
|
const Pose3 & |
body_T_sensor, |
|
|
const double |
line_length, |
|
|
const SharedNoiseModel & |
model, |
|
|
Key |
pose_key, |
|
|
const bool |
use_silu = false |
|
) |
| |
|
inline |
◆ clone()
| gtsam::NonlinearFactor::shared_ptr gtsam::PointToLineSegmentFactor::clone |
( |
| ) |
const |
|
inlineoverride |
◆ equals()
| bool gtsam::PointToLineSegmentFactor::equals |
( |
const NonlinearFactor & |
p, |
|
|
double |
tol = 1e-9 |
|
) |
| const |
|
inlineoverride |
◆ evaluateError()
| Vector gtsam::PointToLineSegmentFactor::evaluateError |
( |
const Pose3 & |
world_T_body, |
|
|
boost::optional< Matrix & > |
H = boost::none |
|
) |
| const |
|
inlineoverride |
◆ line_length()
| double gtsam::PointToLineSegmentFactor::line_length |
( |
| ) |
const |
|
inline |
◆ print()
| void gtsam::PointToLineSegmentFactor::print |
( |
const std::string & |
s = "", |
|
|
const KeyFormatter & |
keyFormatter = DefaultKeyFormatter |
|
) |
| const |
|
inlineoverride |
◆ use_silu()
| bool gtsam::PointToLineSegmentFactor::use_silu |
( |
| ) |
const |
|
inline |
◆ boost::serialization::access
| friend class boost::serialization::access |
|
friend |
The documentation for this class was generated from the following file:
 Public Member Functions inherited from gtsam::PointToLineFactorBase
Public Member Functions inherited from gtsam::PointToLineFactorBase