
How to "Containerize" Trick With Docker
This HOWTO assumes that we building our Docker images on a Linux system. If you're using MacOS or Windows, the translation should hopefully be fairly straight forward.
Contents
Prerequisites:
- Docker is installed on your machine.
- A basic familiarity with Docker. "A Docker Tutorial for Beginners" is an excellent way.
- A basic familiarity with bash shell scripting.
Create a Place to Build Our Docker Images
For this HOWTO we'll try to stay organized by first creating a directory in which we can build our Docker images. Let's also create and environment variable for this directory.
- Create the DockerPlayGround directory and DOCKER_PLAYGROUND environment variable.
mkdir DockerPlayGround
export DOCKER_PLAYGROUND="`pwd`/DockerPlayGround"
Containerize a Basic Trick Environment
In this example we'll build a Docker image, based on Ubuntu 18.04, with Trick 19.5.1 installed.
Dockerfile
# ------------------------------------------------------------------------------
# The image we are building with THIS Dockerfile is based on the ubuntu:18.04
# Docker image from dockerhub (hub.docker.com).
# ------------------------------------------------------------------------------
FROM ubuntu:18.04
# ------------------------------------------------------------------------------
# Install Trick Dependencies identified at
# https://nasa.github.io/trick/documentation/install_guide/Install-Guide#ubuntu
# ------------------------------------------------------------------------------
RUN apt-get update && apt-get install -y \
bison \
clang \
flex \
git \
llvm \
make \
maven \
swig \
cmake \
curl \
g++ \
libx11-dev \
libxml2-dev \
libxt-dev \
libmotif-common \
libmotif-dev \
python3-dev \
zlib1g-dev \
llvm-dev \
libclang-dev \
libudunits2-dev \
libgtest-dev \
openjdk-11-jdk \
zip
ENV PYTHON_VERSION=3
# ------------------------------------------------------------------------------
# Get Trick version 19.5.1 from GitHub, configure and build it.
# ------------------------------------------------------------------------------
# We want to clone Trick into the /apps directory of our image.
WORKDIR /apps
# Get the 19.5.1 branch (an official release) of Trick from Github.
RUN git clone -b 19.5.1 https://github.com/nasa/trick.git
# cd into the directory we just created and ..
WORKDIR /apps/trick
# configure and make Trick.
RUN ./configure && make
# ------------------------------------------------------------------------------
# Add ${TRICK_HOME}/bin to the PATH variable.
# ------------------------------------------------------------------------------
ENV TRICK_HOME="/apps/trick"
RUN echo "export PATH=${PATH}:${TRICK_HOME}/bin" >> ~/.bashrc
CMD ["/bin/bash"]
Building the docker image:
-
Create a directory for building this docker image:
cd ${DOCKER_PLAYGROUND} mkdir TRICK_19_5_1 cd TRICK_19_5_1 -
Create a file named
Dockerfilethat contains the content listed above. -
Build the Docker image by executing:
docker build --tag trick:19.5.1 .:exclamation: This may take a few minutes.
-
When the build completes, execute :
docker images.You should see a record of the image that you just created:
REPOSITORY TAG IMAGE ID CREATED SIZE trick 19.5.1 1023a17d7b78 2 minutes ago 2.61GB
Running the docker image:
To Instantiate a container from the image: docker run --rm -it trick:19.5.1
You should see the bash shell prompt from your container. Something like:
root@8615d8bf75c5:/apps/trick#
Execute: ls at the prompt to see that it contains Trick.
CMakeLists.txt Makefile autoconf configure lib test_overrides.mk trickops.py
CMakeModules. README.md bin docs libexec test_sims.yml trigger
CMakeTestFiles TrickLogo.png config.log doxygen share trick_sims
LICENSE TrickLogo_darkmode.png. config.status include test trick_source
root@8615d8bf75c5:/apps/trick#
This docker container contains a full Trick development environment. You can't run GUI applications on it but you can build a simulation.
Containerize a Trick Simulation
Prerequisites:
- The trick:19.5.1 docker image described above.
Introduction
In this example, we'll create a docker image from which we can run (a version of) SIM_cannon_numeric,
one of the variants of Trick's Cannon Ball simulation. This image will be based on the Trick:19.5.1 image the we previously built.
Our containerized simulation won't start any variable server clients like the sim-control panel or graphics clients, because we can't easily run graphics clients from within the container. But, we can easily connect graphics clients running on the host machine to our containerized simulation.
Creating a Docker friendly version of SIM_cannon_numeric
-
Create a directory for building this docker image:
cd ${DOCKER_PLAYGROUND} mkdir SIM_cannon_docker_build cd SIM_cannon_docker_build -
Create a directory for our version of SIM_cannon.
mkdir SIM_cannon_docker cd SIM_cannon_docker -
Copy the
SIM_cannon_numericS_define file into the current directory.curl -O https://raw.githubusercontent.com/nasa/trick/19.5.1/trick_sims/Cannon/SIM_cannon_numeric/S_define -
Copy
SIM_cannon_numericinclude files.curl --create-dirs --output models/cannon/gravity/include/cannon.h \ https://raw.githubusercontent.com/nasa/trick/19.5.1/trick_sims/Cannon/models/cannon/gravity/include/cannon.h curl --create-dirs --output models/cannon/gravity/include/cannon_numeric.h \ https://raw.githubusercontent.com/nasa/trick/19.5.1/trick_sims/Cannon/models/cannon/gravity/include/cannon_numeric.h -
Copy
SIM_cannon_numericsource files.curl --create-dirs --output models/cannon/gravity/src/cannon_init.c \ https://raw.githubusercontent.com/nasa/trick/19.5.1/trick_sims/Cannon/models/cannon/gravity/src/cannon_init.c curl --create-dirs --output models/cannon/gravity/src/cannon_numeric.c \ https://raw.githubusercontent.com/nasa/trick/19.5.1/trick_sims/Cannon/models/cannon/gravity/src/cannon_numeric.c -
Create a file named
S_overrides.mkthat contains the following content:TRICK_CFLAGS += -Imodels TRICK_CXXFLAGS += -Imodels -
Create and enter a directory named
RUN_demoand enter it:mkdir RUN_demo cd RUN_demo -
Create a file named
input.pythat contains the following content:trick.real_time_enable() trick.exec_set_software_frame(0.1) trick.itimer_enable() trick.var_server_set_port(9001):exclamation: Notice that we are NOT starting a SIM-control-panel, or the graphics client.
:exclamation: Notice that we are explicitly setting the variable server listen port.
The Graphics Client
Even though the simulation won't be starting the graphics clients, we will be starting and connecting the graphics clients to the containerized simulation.
- Download the graphics client's source and Makefile.
cd ${DOCKER_PLAYGROUND}/SIM_cannon_docker_build/SIM_cannon_docker
curl --create-dirs --output models/graphics/src/CannonDisplay.java \
https://raw.githubusercontent.com/nasa/trick/19.5.1/trick_sims/Cannon/models/graphics/src/CannonDisplay.java
curl --create-dirs --output models/graphics/Makefile \
https://raw.githubusercontent.com/nasa/trick/19.5.1/trick_sims/Cannon/models/graphics/Makefile
- Down-load the graphics client's sound files.
There are two sound files necessary to build the graphics client, 1) CannonBoom.wav, and 2) Explosion.wav .
They both need to be placed into models/graphics/resources/.
- Create the resources directory.
mkdir -p models/graphics/resources
- Down-load the sound files.
Unfortunately, binary files are more difficult to down-load from Github than text files.
For each, we have to go to their respective Github pages and click the "Download" button.
:exclamation: When you download the wave files from Github, their names may be set to a flattened version of their full pathnames. So, we have to rename them to their real names.
-
Rename the down-loaded wave files to CannonBoom.wav, and Explosion.wav respectively, and move them both to
models/graphics/resources/. -
Build the cannon graphics client.
cd ${DOCKER_PLAYGROUND}/SIM_cannon_docker_build/SIM_cannon_docker/models/graphics make
Building the Docker Image
Dockerfile
# ------------------------------------------------------------------------------
# The image we are building with THIS Dockerfile is based on the trick:19.5.1
# Docker image that we built previously.
# ------------------------------------------------------------------------------
FROM trick:19.5.1
# ------------------------------------------------------------------------------
# Copy the simulation source code into the image and build it.
# ------------------------------------------------------------------------------
# Set current working directory to the directory where we want our SIM code.
WORKDIR /apps/SIM_cannon
# Copy the simulation source code from our (host) image-build directory into our
# image.
COPY SIM_cannon_docker .
# Build the SIM.
RUN /apps/trick/bin/trick-CP
# In out simulation, we decided to use port 9001 for our
# variable server port. We did this by adding
# "trick.var_server_set_port(9001)" to our input file.
#Expose the variable server port.
EXPOSE 9001/tcp
# Make a script to run SIM_cannon from the /apps directory.
RUN echo "#! /bin/bash" >> /apps/run_sim.sh
RUN echo "cd /apps/SIM_cannon" >> /apps/run_sim.sh
RUN echo "./S_main_Linux_7.5_x86_64.exe RUN_demo/input.py" >> /apps/run_sim.sh
RUN chmod +x /apps/run_sim.sh
CMD ["/apps/run_sim.sh"]
- Make sure you're in the right directory.
cd ${DOCKER_PLAYGROUND}/SIM_cannon_docker_build
-
Create a file named
Dockerfilethat contains the content listed above. -
Build the Docker image by executing:
docker build --tag sim_cannon_docker . -
When the build completes, execute :
docker images.You should see a record of the image that you just created:
REPOSITORY TAG IMAGE ID CREATED SIZE sim_cannon_docker latest d4547502c2a4 13 seconds ago 2.61GB trick 19.5.1 1023a17d7b78 2 minutes ago 2.61GB
Running the docker image:
To instanciate a container from the image: docker run --name misterbill --rm -P sim_cannon_docker &
-
In a host terminal (not in the container) execute:
docker port misterbill
to see what host-port container-port 9001 has been mapped to.
You should see something like:
9001/tcp -> 0.0.0.0:32783
9001/tcp -> [::]:32783
This shows that port 9001 in our container has been mapped to port 32783 on our host computer. So, in this case we would connect our (host) java client to port 32783.
To connect the CannonDisplay variable-server client to the containerized simulation:
java -jar SIM_cannon_docker/models/graphics/dist/CannonDisplay.jar <port> &
:warning: Don't just copy and paste. If you don't put the right port number it won't work.
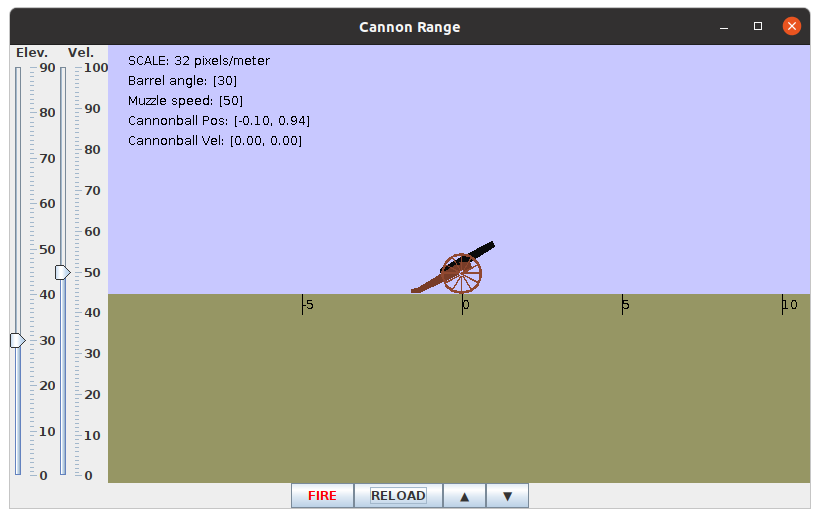
- Click RELOAD. This re-initializes the cannon. Then click FIRE. The cannon will fire.
- Adjust the the controls on the left hand side of the graphics client. RELOAD and FIRE.
- Do this until you're bored.
If Trick is installed on your host then you can also connect :
trick-simcontrol localhost <port> &
You can shut down the sim from the trick-simcontrol panel when you're done.
or if you don't have Trick installed, just use: docker kill misterbill.