4.1.2. Demo 2: Closer Analysis of Simple Arrow Shape¶
The second example is similar to the first pyCart demo except that four fins
have been added and more details of the input files are explained. To get
started, clone the following repo and enter the folder and run a couple of
commands:
This will copy all of the files into a newly created work/ folder. Follow
the instructions below by entering that work/ folder; the purpose is that
you can easily delete the work/ folder and restart the tutorial at any
time.
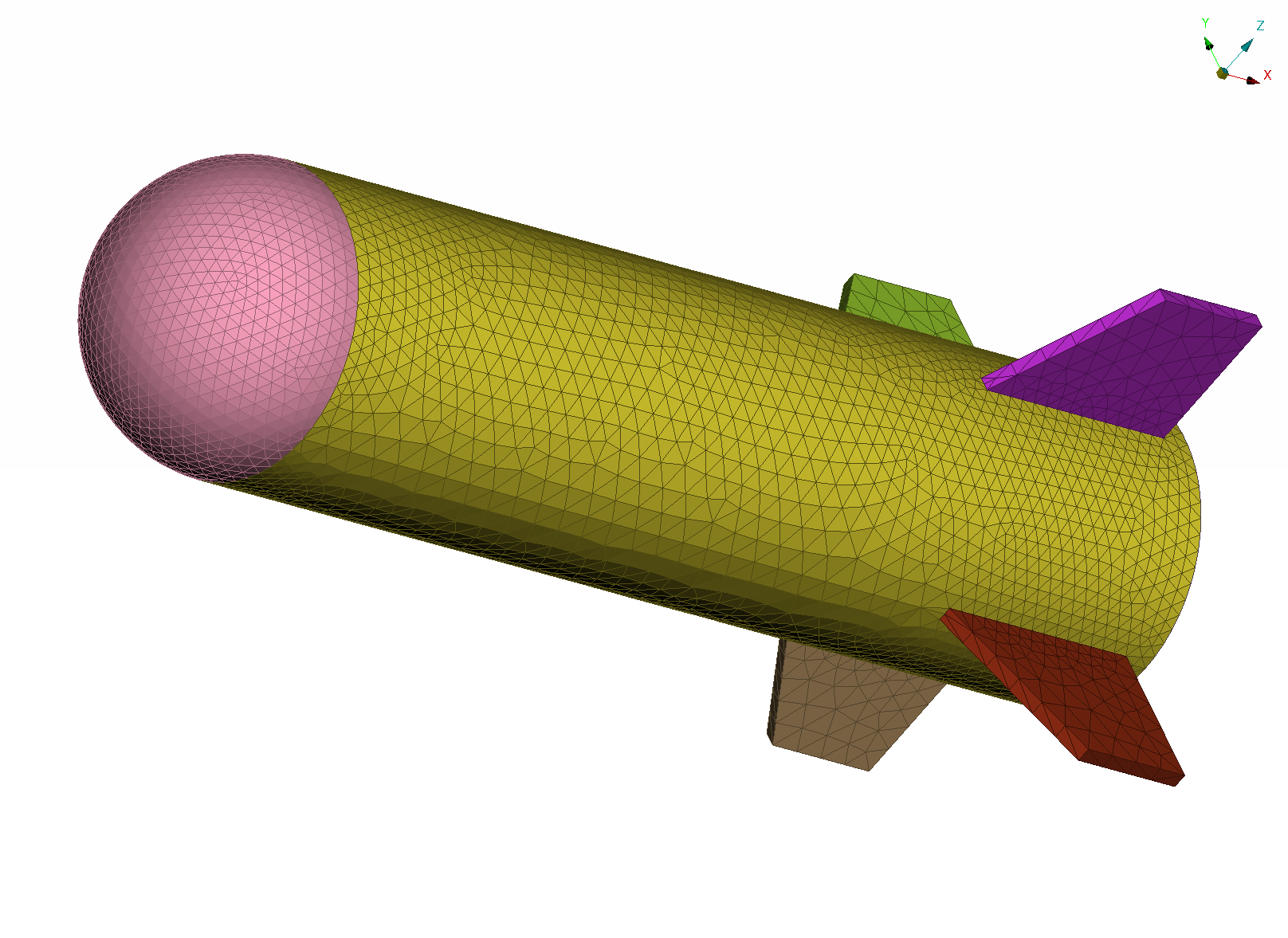
The geometry used for this shape is a capped cylinder with four fins and 9216
faces and seven components. The surface triangulation, arrow.tri, is
shown below.
Figure 4.2 Simple bullet shape triangulation with four fins¶
This example is set up with a larger run matrix in order to demonstrate more of
the features of pyCart.
The pyCart.json file contains the master settings divided into several
sections, which we will discuss in more detail. The overall contents of the
file look something like the following, with the ... replaced by more
content.
{// Iteration control and command-line inputs"RunControl":{// Run sequence"InputSeq":[0],"IterSeq":[200],...},...// RunMatrix (i.e. run matrix) description"RunMatrix":{"Keys":["Mach","alpha_t","phi"],"File":"matrix.csv","GroupMesh":true,"GroupPrefix":"poweroff"}}
The first section (actually, the order does not matter, but it’s the first
section in the file provided) is the "RunControl" section, which has
settings for the overall run procedure (such as number of iterations, whether
or not to submit the job to a queue, etc.) and command-line inputs to the
various Cart3D programs.
"RunControl":{// Run sequence"PhaseSequece":[0],"PhaseIters":[200],// Verbosity"Verbose":true,// System configuration"nProc":4,// Options for ``flowCart``"flowCart":{"it_fc":200,"mpi_fc":0,"use_aero_csh":0,"cfl":1.1,"mg_fc":3,"y_is_spanwise":true},// Defines the flow domain automatically"autoInputs":{"r":8},// Volume mesh options"cubes":{"maxR":10,"pre":"preSpec.c3d.cntl","cubes_a":10,"cubes_b":2,"reorder":true}},
The "flowCart" section contains command-line inputs for running
flowCart, which is the main flow solver of Cart3D, or mpix_flowCart,
which is the MPI version of the same. Many of the variable names, such as
it_fc, are copied from Cart3D’s template aero.csh scripts or
command-line inputs to Cart3D’s flowCart. The three main options (which are
required for any pyCart project) are PhaseSequence, PhaseIters, and
it_fc.
Variable
Description
it_fc
Number of iterations for each call to flowCart,
short for iterations_flowCart; command-line input
is flowCart-N$it_fc
PhaseSequence
Input sequence, tells pyCart to run phase 0; in more
complex projects, this will be a list like [0,1,3]
PhaseIters
Min iterations for each phase; this tells pyCart to
continue calling flowCart until 200 iterations
have been run. If this was 400, pyCart would
automatically run flowCart twice using the first
run’s results as inputs to the second
The Verbose option is relatively self-explanatory in that more information is
printed to either the terminal or the PBS output file. In particular, each
command that is issued to the top-level terminal also prints the name of the
directory in which it is run and the name of the file storing its STDOUT
output.
For a simple case, these parameters seem unnecessarily confusing. Why not just
tell flowCart how many iterations to run and be done with it? For one
thing, IterSeq specifies a required number of iterations whereas it_fc just
suggests to flowCart or mpix_flowCart how many iterations to run. If
flowCart exits early due to some kind of failure, this convention means
that pyCart will clearly alert us.
Secondly, some applications require more sophisticated approach. A common
example is a hypersonic case that needs to be run in first-order mode for a few
iterations first. It might have something like "PhaseIters":[0,400] and
"PhaseSequence":[0,1]. This tells pyCart to run input set 0 until it
has run at least 0 iterations and then phase 1 until it has run at
least 400 iterations.
The remaining inputs are quite a bit simpler. For example nProc sets the
total number of cores or threads to use. The next section allows pyCart to use
the Cart3D binary autoInputs to create the flow domain and basic volume
mesh parameters with the command autoInputs-r8, which sets the farfield
boundary at roughly 8 times the size of your surface triangulation.
Running autoInputs creates files input.c3d and preSpec.c3d.cntl,
which are given as inputs to the volume generator cubes.
The Mesh section controls inputs to the Cart3D commands that produce the
volume mesh. The TriFile setting is relatively obvious and points to the name
of the surface triangulation.
"Config":{// Defer to a file for most things."File":"arrow.xml",// Declare forces and moments"Force":["cap","body","fins","bullet_no_base","bullet_total"],"RefPoint":{"bullet_no_base":[0.0,0.0,0.0]}// Reference quantities"RefArea":3.14159,"RefLength":1.0,},
The Config section gives instructions about which components to track, what
moment reference points to use, and similar definitions. The XML file allows
Cart3D and pyCart to refer to define groups of components and refer to
components by name instead of memorizing their numbers. The Force option
specifies a list of components on which flowCart should track the force at
each iteration. This creates files cap.dat, body.dat, fins.dat,
etc. Then RefPoint specifies the list of components for which to also track
the moments, and the moment reference point to use for each such component. In
this case, the moments will be reported alongside the forces in
bullet_no_base.dat.
The RefArea and RefLength parameters are used here to specify global
reference values, but it is possible to use different reference lengths or
areas for different components in the same run.
The final section (actually, the order is irrelevant, but it’s the last section
in this file) describes the run matrix, i.e. trajectory. The Keys parameter
lists the names of variables that will change in the run matrix, i.e. the
independent variables. In this case, we are using Mach number, total angle of
attack, and velocity roll angle. There is a set of predefined trajectory keys,
and all three of these examples are in that set, but later examples will show
how to define customized trajectory keys in this section.
The File parameter points to a file in which the cases to run are listed, and
GroupMesh specifies whether or not each case can use the same mesh. Setting
it to true means that cubes is only run once for the matrix (more
accurately, once for each group, but this example has only one group). The
GroupPrefix gives a name for the folder in which to put all the cases, which
explains why a typical case is named poweroff/m1.50a2.00r0.00, for example.
There are two more sections in the pyCart.json, which describe various
products.
The first line is a summary of the contents of the file. It states that there
are 4610 nodes, i.e. three-dimensional points in space, and 9216
triangles. What follows is 4610 lines with three floating point numbers per
line. Next is 9216 lines in which each line defines one triangle. For example,
the first triangle connects node 385 to node 386 to node 16. After
9216 such lines, there are 9216 more lines with a single integer on each line
that defines the component ID of each triangle. Thus triangle 1 is part of
component 1, triangle 2 is part of component 1, and the last triangle is part of
component 11.
Cart3D uses an optional XML file that associates names with each component. It
uses a standard XML format with component IDs (the numbers at the end of the
.tri file discussed above) with a FaceLabel value inside a
<Data> tag. It also allows for the definition of a “container” component
that is the combination of several other components. This makes it possible to
track fin1 separately while also tracking all the fins as a group. The
contents of the file are shown below.
<?xml version="1.0" encoding="ISO-8859-1"?><ConfigurationName="bullet sample"Source="bullet.tri"><!-- Containers --><ComponentName="bullet_no_base"Type="container"Parent="bullet_total"></Component><ComponentName="fins"Type="container"Parent="bullet_no_base"></Component><ComponentName="bullet_total"Type="container"></Component><!-- Containers --><!-- body --><ComponentName="cap"Type="tri"><Data>FaceLabel=1</Data></Component><ComponentName="body"Type="tri"><Data>FaceLabel=2</Data></Component><ComponentName="base"Parent="bullet_total"Type="tri"><Data>FaceLabel=3</Data></Component><!-- body --><!-- fins --><ComponentName="fin1"Parent="fins"Type="tri"><Data>FaceLabel=11</Data></Component><ComponentName="fin2"Parent="fins"Type="tri"><Data>FaceLabel=12</Data></Component><ComponentName="fin3"Parent="fins"Type="tri"><Data>FaceLabel=13</Data></Component><ComponentName="fin4"Parent="fins"Type="tri"><Data>FaceLabel=14</Data></Component><!-- fins --></Configuration>
The comment line at the top is not read by pyCart but is placed there for
readability. Further, the commas are not required; pyCart and other CAPE
modules read trajectory files in a pretty general way.
Let’s run one case, but not the first case. We can do this by using the
pycart-I command to pick out a specific index or a range of indices.
$ pycart -I 12
Case Config/Run Directory Status Iterations Que CPU Time
---- ----------------------- ------- ----------- --- --------
0 poweroff/m1.75a1.0r15.0 --- / .
Group name: 'poweroff' (index 0)
Preparing surface triangulation...
Reading tri file(s) from root directory.
Writing triangulation: 'Components.i.tri'
> autoInputs -r 8 -t Components.i.tri -maxR 10
(PWD = 'pycart02-arrow/poweroff')
(STDOUT = 'autoInputs.out')
> cubes -pre preSpec.c3d.cntl -maxR 10 -reorder -a 10 -b 2
(PWD = 'pycart02-arrow/poweroff')
(STDOUT = 'cubes.out')
> mgPrep -n 3
(PWD = '/u/wk/ddalle/usr/pycart/examples/pycart/02_arrow/poweroff')
(STDOUT = 'mgPrep.out')
Using template for 'input.cntl' file
Starting case 'poweroff/m1.75a1.0r15.0'.
> flowCart -his -clic -N 200 -y_is_spanwise -limiter 2 -T -cfl 1.1 -mg 3 -binaryIO -tm 0
(PWD = 'poweroff/m1.75a1.0r15.0')
(STDOUT = 'flowCart.out')
Submitted or ran 1 job(s).
---=1,
We can check the status of all the cases at Mach 1.75 using the following. Like
the previous example, the CPU time is below 0.1 hours.
$ pycart -I 11:15 -c
Case Config/Run Directory Status Iterations Que CPU Time
---- ----------------------- ------- ----------- --- --------
0 poweroff/m1.75a1.0r0.0 --- / .
1 poweroff/m1.75a1.0r15.0 DONE 200/200 . 0.0
2 poweroff/m1.75a1.0r30.0 --- / .
3 poweroff/m1.75a1.0r45.0 --- / .
---=3, DONE=1,
We can use a more direct method to select cases with a certain Mach number using
a constraint. Let’s run the remaining Mach 1.75 cases using that capability.
$ pycart --cons "Mach==1.75, alpha_t==1.0"
Case Config/Run Directory Status Iterations Que CPU Time
---- ----------------------- ------- ----------- --- --------
0 poweroff/m1.75a1.0r0.0 --- / .
Using template for 'input.cntl' file
Starting case 'poweroff/m1.75a1.0r0.0'.
> flowCart -his -clic -N 200 -y_is_spanwise -limiter 2 -T -cfl 1.1 -mg 3 -binaryIO -tm 0
(PWD = 'poweroff/m1.75a1.0r0.0')
(STDOUT = 'flowCart.out')
1 poweroff/m1.75a1.0r15.0 DONE 200/200 . 0.0
2 poweroff/m1.75a1.0r30.0 --- / .
Using template for 'input.cntl' file
Starting case 'poweroff/m1.75a1.0r30.0'.
> flowCart -his -clic -N 200 -y_is_spanwise -limiter 2 -T -cfl 1.1 -mg 3 -binaryIO -tm 0
(PWD = 'poweroff/m1.75a1.0r30.0')
(STDOUT = 'flowCart.out')
3 poweroff/m1.75a1.0r45.0 --- / .
Using template for 'input.cntl' file
Starting case 'poweroff/m1.75a1.0r45.0'.
> flowCart -his -clic -N 200 -y_is_spanwise -limiter 2 -T -cfl 1.1 -mg 3 -binaryIO -tm 0
(PWD = 'poweroff/m1.75a1.0r45.0')
(STDOUT = 'flowCart.out')
Submitted or ran 3 job(s).
---=3, DONE=1,
It is also possible to select these cases using pycart--filterm1.75a1,
pycart--glob"*m1.75a1*", or pycart--re"m1\.75a1". The last of these
checks for a regular expression, which allows more complex filters to be
applied.
Let’s take a look at the files that pyCart created. First, let’s look at the
files that define the mesh in the poweroff/ folder.
$ cd poweroff/
$ ls
autoInputs.out input.c3d m1.75a1.0r45.0 mgPrep.out
Components.i.tri m1.75a1.0r0.0 Mesh.c3d.Info preSpec.c3d.cntl
Config.xml m1.75a1.0r15.0 Mesh.mg.c3d
cubes.out m1.75a1.0r30.0 Mesh.R.c3d
The .out files save STDIO printouts from the mesh-generation commands.
The Mesh.mg.c3d is the actual mesh file, including multigrid levels
(i.e., coarsened grids). Our surface triangulation, arrow.tri is copied
to Components.i.tri in this folder; and the configuration file
arrow.xml is copied to Config.xml. The single mesh without
multigrid levels is Mesh.R.c3d, and the remaining files are created by
autoInputs.
The contents of input.c3d set the minimum and maximum x, y, and z
coordinates for the domain on which Cart3D is solved, and is a pretty unique
file. In this case, it is created automatically by autoInputs based on the
physical size of the Components.i.tri surface. The other auto-created
file, preSpec.c3d.cntl defines regions in which the volume mesh should
have increased resolution. Calling cubes also generates regions of
increased resolution based on distance from the surface, but this file can be
used to request more detail. In addition to some header lines, the contents
look something like the following.
The third row of BBox commands define a region with x-coordinates between
1.7 and 7.3, y-coordinates between -0.8 and +0.8, and z-coordinates between
-0.8 and +0.8. Within this region, cubes must make a mesh that has been
refined at least 7 times. In other words, the mesh size must be at least 128
times smaller than the original mesh.
Obviously, there are quite a few files, although many of them are links. For
example, the files that are listed here and in the parent folder discussed
above are either links or copies. The input.c3d and
preSpec.c3d.cntl files are copied because they are small.
Most of the files ending with .dat are iterative history files. Some of
these are standard results of running flowCart, and others are specifically
requested. The most special of these is history.dat, which contains the
residual history. In pyCart, this file is used to determine how many iterations
have been run. With the exception of some comment lines, each line reports one
iteration number and the residual at that iteration.
The files forces.dat and moments.dat report the forces and
moments on the entire component, i.e. the entire triangulation. These files
are always produced, report results before any axis changes, and are ignored by
pyCart. Four other files, body.dat, bullet_no_base.dat,
bullet_total.dat, and cap.dat, are specifically requested.
Cart3D produces them because the input.cntl file contains lines Forcebody, Forcecap, etc. in the $__Force_Moment_Processing: section.
Although we did not request entire in our pyCart setup, it got produced
here because the template input.cntl file contains the line Forceentire. These .dat files are used by pyCart to read the iterative history
of forces and moments on parts of the vehicle.
The volume and surfaceresults files are check.00200,
Components.00200.plt, Components.i.triq, and cutPlanes.00200.plt.
The check.00200 file is a binary file used and created by Cart3D, and the
plt files are Tecplot files. These Tecplot files are created by Cart3D, and
pyCart changes the file names by inserting the iteration numbers to which they
correspond. Finally, the Components.i.triq file is very similar to the
surface triangulation except with extra info describing the state solution at
each vertex. Noe that the Components.0200.plt and Components.i.triq
files do not contain identical information because the Tecplot file references
the Cartesian volume mesh projected onto the surface while the triq file
only has solution data at the triangulation vertices.
Also in this folder are the files run_cart3d.pbs, which is a script used to
run flowCart.
#!/bin/bash#PBS -S /bin/bash#PBS -N m1.75a1r0#PBS -r n#PBS -j oe#PBS -l select=1:ncpus=12:mpiprocs=12#PBS -l walltime=2:00:00#PBS -q normal# Go to the working directory.cd/u/wk/ddalle/usr/pycart/examples/pycart/02_arrow/poweroff/m1.75a1.0r0.0
# Additional shell commands# Call the flowCart/mpix_flowCart/aero.csh interface.
run_flowCart.py
The script includes some PBS settings (which are not used in this example), a
command to change to the correct folder using an absolute path, whatever shell
commands are specified in the JSON file, and a command to determine the correct
Cart3D command. The file case.json contains all of the
pyCart.json settings from the "flowCart" section, because they are
needed to determine the command-line inputs.
That covers the essential files for this example. The very import
input.cntl file (which in this case is just a link to
input.00.cntl) is worthy of far more discussion, and there are several
other files that have varying degrees of utility, but that will have to come at
a different time and place.