|
NASA Astrobee Robot Software
0.19.1
Flight software for the Astrobee robots operating inside the International Space Station.
|
|
NASA Astrobee Robot Software
0.19.1
Flight software for the Astrobee robots operating inside the International Space Station.
|
#include <ros/console.h>#include <ros/time.h>#include <ff_msgs/AgentStateStamped.h>#include <ff_msgs/ControlState.h>#include <ff_msgs/CommandStamped.h>#include <ff_msgs/CompressedFile.h>#include <ff_msgs/ControlFeedback.h>#include <ff_msgs/PlanStatusStamped.h>#include <geometry_msgs/InertiaStamped.h>#include <jsonloader/command.h>#include <jsonloader/plan.h>#include <string>#include <vector>
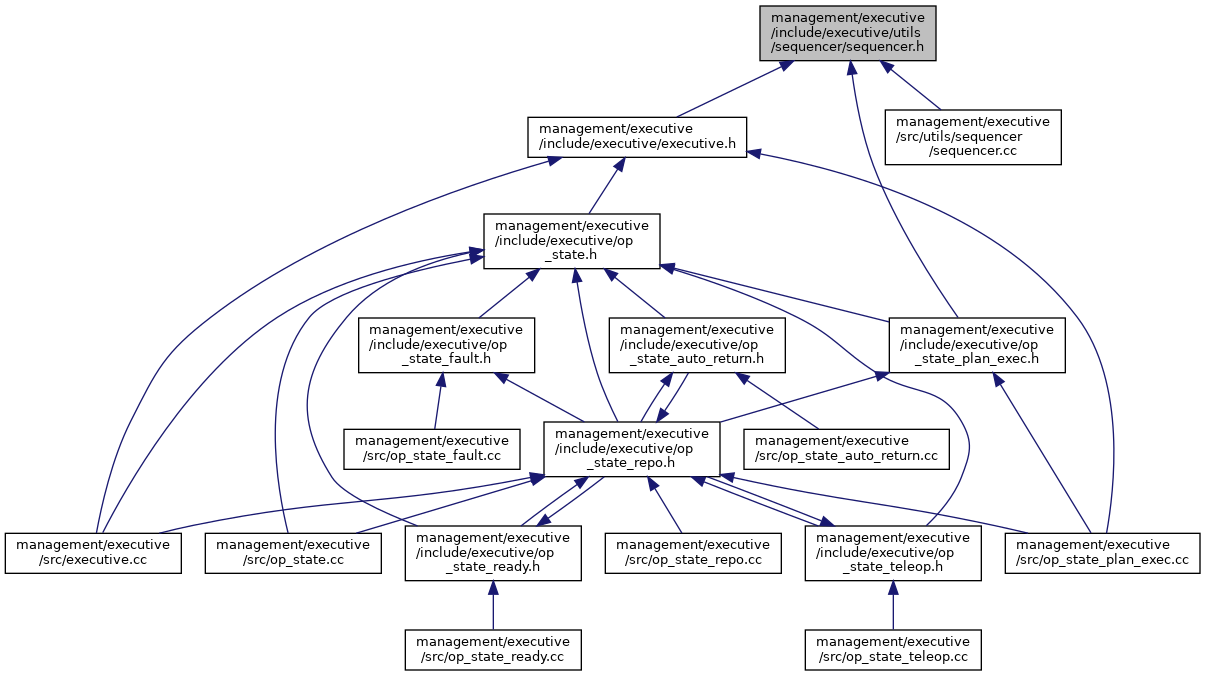
Go to the source code of this file.
Classes | |
| class | sequencer::Sequencer |
Namespaces | |
| sequencer | |
Enumerations | |
| enum | sequencer::ItemType { sequencer::ItemType::NONE, sequencer::ItemType::COMMAND, sequencer::ItemType::SEGMENT } |
Functions | |
| bool | sequencer::LoadPlan (ff_msgs::CompressedFile::ConstPtr const &cf, Sequencer *seq) |
| std::vector< ff_msgs::ControlState > | sequencer::Segment2Trajectory (jsonloader::Segment const &segment) |