|
NASA Astrobee Robot Software
0.19.1
Flight software for the Astrobee robots operating inside the International Space Station.
|
|
NASA Astrobee Robot Software
0.19.1
Flight software for the Astrobee robots operating inside the International Space Station.
|
#include <ff_msgs/EkfState.h>#include <ff_msgs/FlightMode.h>#include <ff_msgs/GraphLocState.h>#include <ff_msgs/GraphVIOState.h>#include <imu_integration/imu_integrator.h>#include <localization_common/combined_nav_state.h>#include <localization_common/combined_nav_state_covariances.h>#include <localization_common/pose_interpolater.h>#include <localization_common/rate_timer.h>#include <localization_measurements/imu_measurement.h>#include <ros_pose_extrapolator/ros_pose_extrapolator_params.h>#include <geometry_msgs/PoseWithCovarianceStamped.h>#include <sensor_msgs/Imu.h>#include <memory>#include <string>#include <utility>
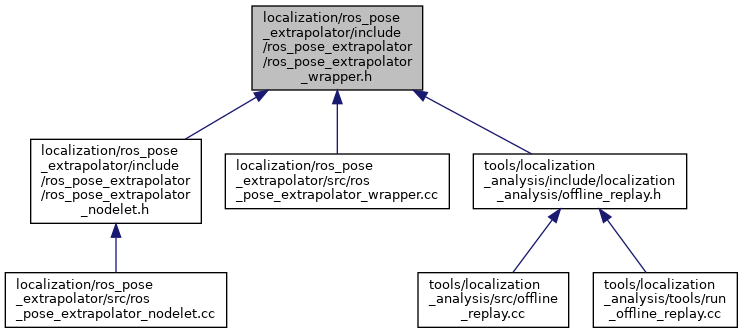
Go to the source code of this file.
Classes | |
| class | ros_pose_extrapolator::RosPoseExtrapolatorWrapper |
Namespaces | |
| ros_pose_extrapolator | |