|
NASA Astrobee Robot Software
0.19.1
Flight software for the Astrobee robots operating inside the International Space Station.
|
|
NASA Astrobee Robot Software
0.19.1
Flight software for the Astrobee robots operating inside the International Space Station.
|
#include <ros/ros.h>#include <pcl/conversions.h>#include <pcl/PCLHeader.h>#include <std_msgs/Header.h>#include <pcl/PCLPointField.h>#include <sensor_msgs/PointField.h>#include <pcl/PCLPointCloud2.h>#include <sensor_msgs/PointCloud2.h>#include <Eigen/Geometry>#include <Eigen/StdVector>#include <vector>#include <string>
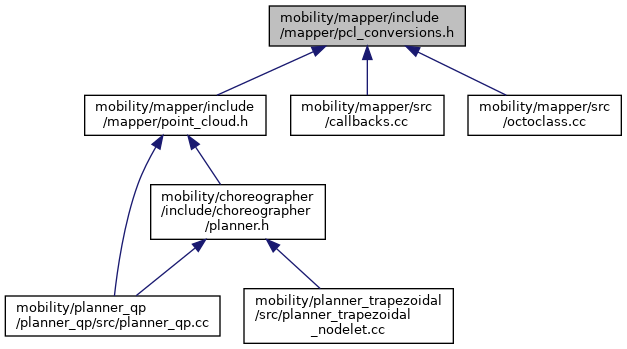
Go to the source code of this file.
Namespaces | |
| pcl_conversions | |
| pcl | |
| ros | |
| ros::serialization | |
Functions | |
| void | pcl_conversions::fromPCL (const pcl::uint64_t &pcl_stamp, ros::Time &stamp) |
| void | pcl_conversions::toPCL (const ros::Time &stamp, pcl::uint64_t &pcl_stamp) |
| ros::Time | pcl_conversions::fromPCL (const pcl::uint64_t &pcl_stamp) |
| pcl::uint64_t | pcl_conversions::toPCL (const ros::Time &stamp) |
| void | pcl_conversions::fromPCL (const pcl::PCLHeader &pcl_header, std_msgs::Header &header) |
| void | pcl_conversions::toPCL (const std_msgs::Header &header, pcl::PCLHeader &pcl_header) |
| std_msgs::Header | pcl_conversions::fromPCL (const pcl::PCLHeader &pcl_header) |
| pcl::PCLHeader | pcl_conversions::toPCL (const std_msgs::Header &header) |
| void | pcl_conversions::fromPCL (const pcl::PCLPointField &pcl_pf, sensor_msgs::PointField &pf) |
| void | pcl_conversions::fromPCL (const std::vector< pcl::PCLPointField > &pcl_pfs, std::vector< sensor_msgs::PointField > &pfs) |
| void | pcl_conversions::toPCL (const sensor_msgs::PointField &pf, pcl::PCLPointField &pcl_pf) |
| void | pcl_conversions::toPCL (const std::vector< sensor_msgs::PointField > &pfs, std::vector< pcl::PCLPointField > &pcl_pfs) |
| void | pcl_conversions::copyPCLPointCloud2MetaData (const pcl::PCLPointCloud2 &pcl_pc2, sensor_msgs::PointCloud2 &pc2) |
| void | pcl_conversions::fromPCL (const pcl::PCLPointCloud2 &pcl_pc2, sensor_msgs::PointCloud2 &pc2) |
| void | pcl_conversions::moveFromPCL (pcl::PCLPointCloud2 &pcl_pc2, sensor_msgs::PointCloud2 &pc2) |
| void | pcl_conversions::copyPointCloud2MetaData (const sensor_msgs::PointCloud2 &pc2, pcl::PCLPointCloud2 &pcl_pc2) |
| void | pcl_conversions::toPCL (const sensor_msgs::PointCloud2 &pc2, pcl::PCLPointCloud2 &pcl_pc2) |
| void | pcl_conversions::moveToPCL (sensor_msgs::PointCloud2 &pc2, pcl::PCLPointCloud2 &pcl_pc2) |
| int | pcl::getFieldIndex (const sensor_msgs::PointCloud2 &cloud, const std::string &field_name) |
| std::string | pcl::getFieldsList (const sensor_msgs::PointCloud2 &cloud) |
| template<typename T > | |
| void | pcl::toROSMsg (const pcl::PointCloud< T > &pcl_cloud, sensor_msgs::PointCloud2 &cloud) |
| template<typename T > | |
| void | pcl::fromROSMsg (const sensor_msgs::PointCloud2 &cloud, pcl::PointCloud< T > &pcl_cloud) |
| template<typename T > | |
| void | pcl::moveFromROSMsg (sensor_msgs::PointCloud2 &cloud, pcl::PointCloud< T > &pcl_cloud) |
| template<typename PointT > | |
| void | pcl::createMapping (const std::vector< sensor_msgs::PointField > &msg_fields, MsgFieldMap &field_map) |