|
NASA Astrobee Robot Software
0.19.1
Flight software for the Astrobee robots operating inside the International Space Station.
|
|
NASA Astrobee Robot Software
0.19.1
Flight software for the Astrobee robots operating inside the International Space Station.
|
#include <localization_common/timestamped_set.h>#include <vision_common/feature_point.h>#include <vision_common/standstill_params.h>#include <Eigen/Geometry>#include <gtsam/base/Matrix.h>#include <opencv2/core/eigen.hpp>#include <opencv2/opencv.hpp>#include <vector>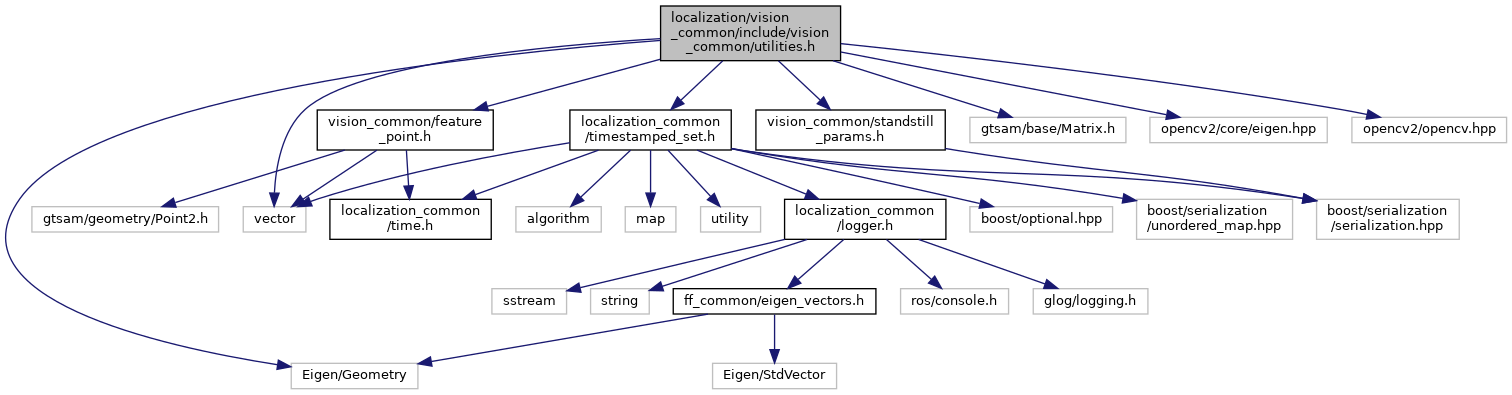
Go to the source code of this file.
Namespaces | |
| vision_common | |
Functions | |
| template<typename T > | |
| Eigen::Matrix< T, 2, 1 > | vision_common::RelativeCoordinates (const Eigen::Matrix< T, 2, 1 > &absolute_point, const Eigen::Matrix< T, 3, 3 > &intrinsics) |
| template<typename T > | |
| Eigen::Matrix< T, 2, 1 > | vision_common::AbsoluteCoordinates (const Eigen::Matrix< T, 2, 1 > &relative_point, const Eigen::Matrix< T, 3, 3 > &intrinsics) |
| Eigen::Vector3d | vision_common::Backproject (const Eigen::Vector2d &measurement, const Eigen::Matrix3d &intrinsics, const double depth, gtsam::OptionalJacobian< 3, 1 > d_backprojected_point_d_depth=boost::none) |
| Eigen::Vector2d | vision_common::FocalLengths (const Eigen::Matrix3d &intrinsics) |
| Eigen::Vector2d | vision_common::PrincipalPoints (const Eigen::Matrix3d &intrinsics) |
| Eigen::Vector2d | vision_common::Project (const Eigen::Vector3d &cam_t_point, const Eigen::Matrix3d &intrinsics, gtsam::OptionalJacobian< 2, 3 > d_projected_point_d_cam_t_point=boost::none) |
| template<typename DISTORTER > | |
| Eigen::Vector2d | vision_common::ProjectWithDistortion (const Eigen::Vector3d &cam_t_point, const Eigen::Matrix3d &intrinsics, const Eigen::VectorXd &distortion_params) |
| Eigen::Isometry3d | vision_common::Isometry3d (const cv::Mat &rodrigues_rotation_cv, const cv::Mat &translation_cv) |
| double | vision_common::AverageDistanceFromMean (const std::vector< FeaturePoint > &points) |
| double | vision_common::AverageDistanceFromMean (const std::vector< localization_common::TimestampedValue< FeaturePoint >> ×tamped_points) |
| template<typename FeatureTracksMapType > | |
| bool | vision_common::Standstill (const FeatureTracksMapType &feature_tracks, const StandstillParams ¶ms) |