|
NASA Astrobee Robot Software
0.19.1
Flight software for the Astrobee robots operating inside the International Space Station.
|
|
NASA Astrobee Robot Software
0.19.1
Flight software for the Astrobee robots operating inside the International Space Station.
|
#include <ros/time.h>#include <rapidDds/Header.h>#include <rapidDds/HeaderSupport.h>#include <rapidUtil/RapidHelper.h>#include <std_msgs/Header.h>#include <stdint.h>#include <string>
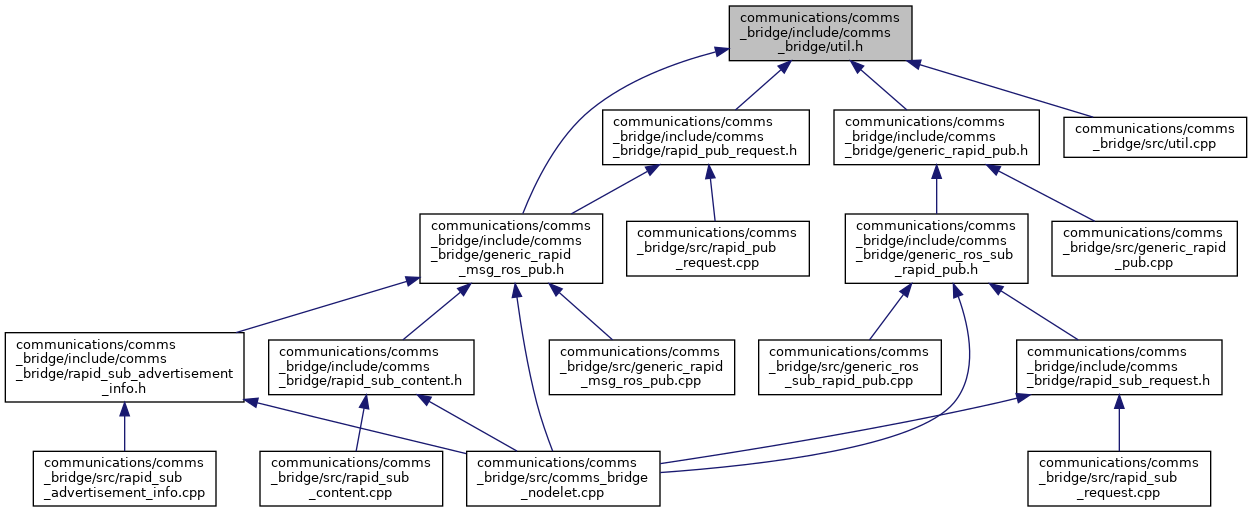
Go to the source code of this file.
Namespaces | |
| comms_util | |
Functions | |
| ::ros::Time | comms_util::RapidTime2RosTime (const int64_t dds_time) |
| int64_t | comms_util::RosTime2RapidTime (::ros::Time const &ros_time) |
| void | comms_util::RosHeader2Rapid (::std_msgs::Header const &ros_hdr, ::rapid::Header *rapid_hdr, int status=0, int serial=-1) |
| void | comms_util::RapidHeader2Ros (::rapid::Header const &rapid_hdr, ::std_msgs::Header *ros_hdr, std::string const &frame_id="world") |