|
NASA Astrobee Robot Software
0.19.1
Flight software for the Astrobee robots operating inside the International Space Station.
|
|
NASA Astrobee Robot Software
0.19.1
Flight software for the Astrobee robots operating inside the International Space Station.
|
#include <node_adders/timestamped_node_adder_model.h>#include <node_adders/measurement_based_timestamped_node_adder_model.h>#include <node_adders/utilities.h>#include <nodes/timestamped_nodes.h>#include <gtsam/inference/Key.h>#include <gtsam/geometry/Pose3.h>#include <gtsam/nonlinear/NonlinearFactorGraph.h>#include <gtsam/slam/BetweenFactor.h>#include <utility>#include <vector>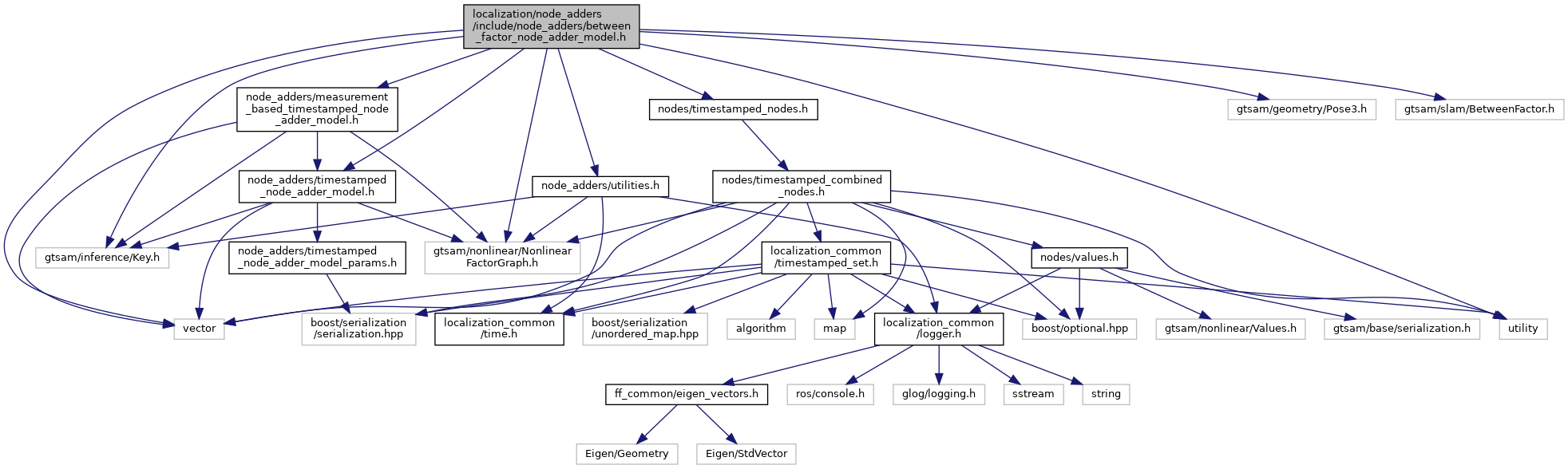

Go to the source code of this file.
Classes | |
| class | node_adders::BetweenFactorNodeAdderModel< NodeType, NodeAdderModelType > |
Namespaces | |
| node_adders | |
Typedefs | |
| template<typename MeasurementType , typename NodeType > | |
| using | node_adders::BetweenFactorMeasurementBasedTimestampedNodeAdderModel = BetweenFactorNodeAdderModel< NodeType, MeasurementBasedTimestampedNodeAdderModel< MeasurementType, NodeType, nodes::TimestampedNodes< NodeType > >> |
| template<typename NodeType > | |
| using | node_adders::BetweenFactorTimestampedNodeAdderModel = BetweenFactorNodeAdderModel< NodeType, TimestampedNodeAdderModel< NodeType, nodes::TimestampedNodes< NodeType > >> |