|
NASA Astrobee Robot Software
0.19.1
Flight software for the Astrobee robots operating inside the International Space Station.
|
|
NASA Astrobee Robot Software
0.19.1
Flight software for the Astrobee robots operating inside the International Space Station.
|
#include <octomap/octomap.h>#include <octomap/OcTree.h>#include <visualization_msgs/MarkerArray.h>#include <ff_msgs/Zone.h>#include <ff_msgs/SetZones.h>#include <ff_msgs/GetZones.h>#include <msg_conversions/msg_conversions.h>#include <Eigen/Core>#include <string>#include <vector>#include <set>
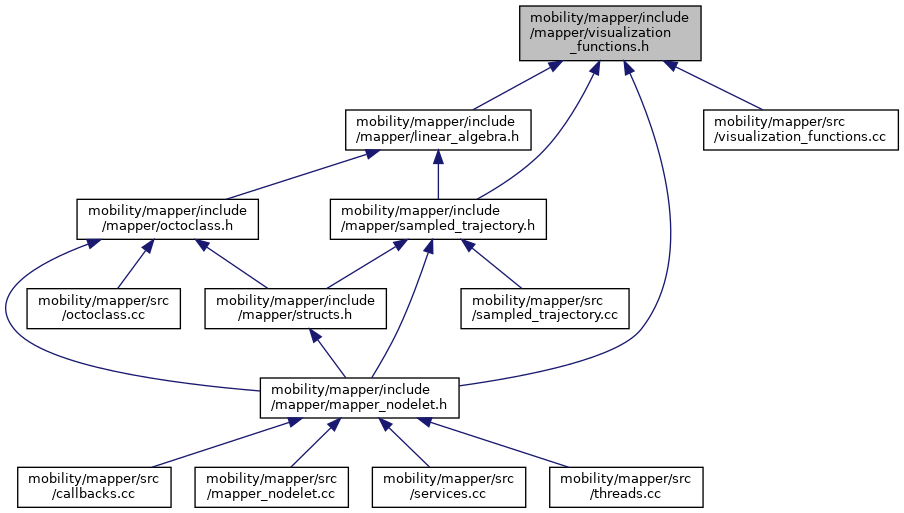
Go to the source code of this file.
Classes | |
| class | visualization_functions::Color |
Namespaces | |
| visualization_functions | |
Functions | |
| void | visualization_functions::SetMarkerProperties (const std_msgs::Header &header, const double &life_time, visualization_msgs::MarkerArray *markers) |
| void | visualization_functions::SetMarkersForDeletion (visualization_msgs::MarkerArray *marker_array) |
| void | visualization_functions::DeleteMarkersTemplate (const std::string &frame_id, visualization_msgs::MarkerArray *marker_array) |
| void | visualization_functions::DrawObstacleNodes (const std::vector< Eigen::Vector3d > &points, const std::string &frame_id, const double &resolution, visualization_msgs::MarkerArray *marker_array) |
| void | visualization_functions::DrawTreeNodes (const std::vector< Eigen::Vector3d > points, const std::string &frame_id, const double resolution, visualization_msgs::MarkerArray *marker_array) |
| void | visualization_functions::DrawCollidingNodes (const std::vector< Eigen::Vector3d > &points, const std::string &frame_id, const double &resolution, visualization_msgs::MarkerArray *marker_array) |
| void | visualization_functions::DrawCollidingNodes (const std::vector< octomap::point3d > &points, const std::string &frame_id, const double &resolution, visualization_msgs::MarkerArray *marker_array) |
| void | visualization_functions::DrawNodes (const std::vector< Eigen::Vector3d > &points, const std::string &frame_id, const std::string &ns, const double &resolution, const std_msgs::ColorRGBA &color, const double &transparency, visualization_msgs::MarkerArray *marker_array) |
| void | visualization_functions::DrawNodes (const std::vector< octomap::point3d > &points, const std::string &frame_id, const std::string &ns, const double &resolution, const std_msgs::ColorRGBA &color, const double &transparency, visualization_msgs::MarkerArray *marker_array) |
| void | visualization_functions::MarkerNode (const Eigen::Vector3d &point, const std::string &frame_id, const std::string &ns, const double &resolution, const std_msgs::ColorRGBA &color, const double &transparency, const int &seqNumber, visualization_msgs::Marker *marker) |
| void | visualization_functions::PathVisualization (const std::vector< Eigen::Vector3d > &total_path, const std::vector< Eigen::Vector3d > &waypoints, visualization_msgs::MarkerArray *markers) |
| void | visualization_functions::PathVisualization (const std::vector< Eigen::Vector3d > &total_path, const std::vector< Eigen::Vector3d > &waypoints, const std_msgs::ColorRGBA &color, const std::string &ns, visualization_msgs::MarkerArray *markers) |
| void | visualization_functions::DrawArrowPoints (const Eigen::Vector3d &p1, const Eigen::Vector3d &p2, const std_msgs::ColorRGBA &color, const double &diameter, visualization_msgs::Marker *marker) |