|
NASA Astrobee Robot Software
0.19.1
Flight software for the Astrobee robots operating inside the International Space Station.
|
|
NASA Astrobee Robot Software
0.19.1
Flight software for the Astrobee robots operating inside the International Space Station.
|
#include <Eigen/Geometry>#include <Eigen/StdVector>#include <vector>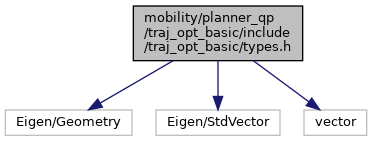
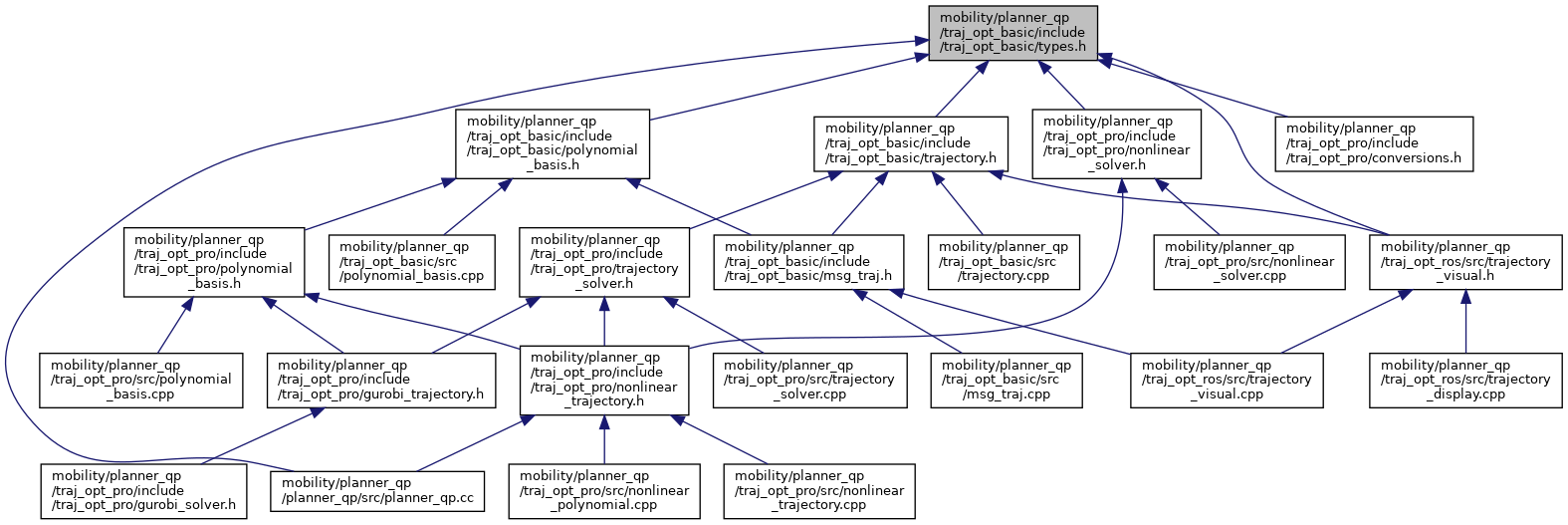
Go to the source code of this file.
Namespaces | |
| traj_opt | |
Typedefs | |
| typedef double | traj_opt::decimal_t |
| typedef Eigen::Matrix< decimal_t, 3, 1 > | traj_opt::Vec3 |
| typedef Eigen::Matrix< decimal_t, 4, 1 > | traj_opt::Vec4 |
| typedef Eigen::Matrix< decimal_t, 3, 3 > | traj_opt::Mat3 |
| typedef Eigen::Matrix< decimal_t, 4, 4 > | traj_opt::Mat4 |
| typedef std::vector< Vec4, Eigen::aligned_allocator< Vec4 > > | traj_opt::Vec4Vec |
| typedef std::vector< Vec3, Eigen::aligned_allocator< Vec3 > > | traj_opt::Vec3Vec |
| typedef std::vector< Mat4, Eigen::aligned_allocator< Mat4 > > | traj_opt::Mat4Vec |
| typedef Eigen::Matrix< decimal_t, Eigen::Dynamic, 1 > | traj_opt::VecD |
| typedef Eigen::Matrix< decimal_t, Eigen::Dynamic, 3 > | traj_opt::MatD3 |
| typedef Eigen::Matrix< decimal_t, Eigen::Dynamic, Eigen::Dynamic > | traj_opt::MatD |
| typedef std::vector< VecD > | traj_opt::VecDVec |
| typedef std::vector< MatD > | traj_opt::MatDVec |
| typedef Eigen::Quaternion< decimal_t > | traj_opt::Quat |