|
NASA Astrobee Robot Software
0.19.1
Flight software for the Astrobee robots operating inside the International Space Station.
|
|
NASA Astrobee Robot Software
0.19.1
Flight software for the Astrobee robots operating inside the International Space Station.
|
#include <localization_common/logger.h>#include <localization_common/time.h>#include <gtsam/inference/Key.h>#include <gtsam/nonlinear/NonlinearFactorGraph.h>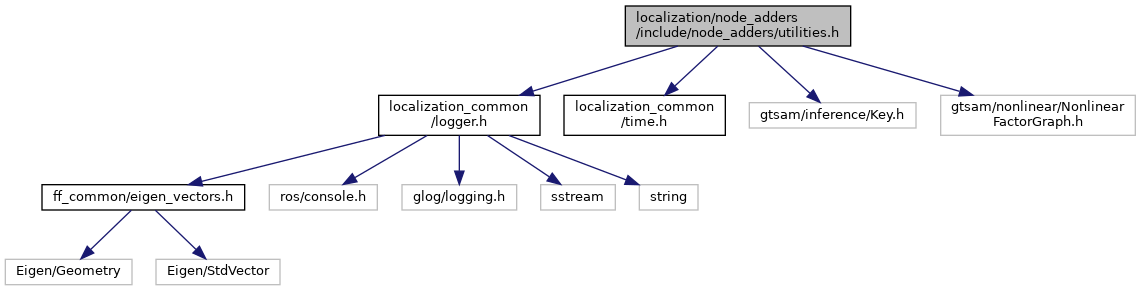
Go to the source code of this file.
Namespaces | |
| node_adders | |
Functions | |
| template<typename FactorType > | |
| bool | node_adders::RemoveFactor (const gtsam::KeyVector &keys, gtsam::NonlinearFactorGraph &factors) |
| template<typename FactorType , typename NodesType > | |
| bool | node_adders::RemoveRelativeFactor (const localization_common::Time timestamp_a, const localization_common::Time timestamp_b, const NodesType &nodes, gtsam::NonlinearFactorGraph &factors) |
| gtsam::Matrix | node_adders::Covariance (const gtsam::SharedNoiseModel &robust_gaussian_noise) |